Wolfram Language
Paclet Repository
Community-contributed installable additions to the Wolfram Language
Primary Navigation
Categories
Cloud & Deployment
Core Language & Structure
Data Manipulation & Analysis
Engineering Data & Computation
External Interfaces & Connections
Financial Data & Computation
Geographic Data & Computation
Geometry
Graphs & Networks
Higher Mathematical Computation
Images
Knowledge Representation & Natural Language
Machine Learning
Notebook Documents & Presentation
Scientific and Medical Data & Computation
Social, Cultural & Linguistic Data
Strings & Text
Symbolic & Numeric Computation
System Operation & Setup
Time-Related Computation
User Interface Construction
Visualization & Graphics
Random Paclet
Alphabetical List
Using Paclets
Create a Paclet
Get Started
Download Definition Notebook
Learn More about
Wolfram Language
LinearSystems
Guides
Guide for ZigangPan`LinearSystems`
Symbols
calculaterelativedegree
controllabilityQandindices
controllercanonicalform
detectabilityQ
DTLyapunovequation
DTRiccatiequation
dynamicextension
emptyLTIsystem
EZDCFAD
EZDCF
gainsystem
generalizedRiccatiequationHM
linearLyapunovequation
observabilityQandindices
observercanonicalform
rd0DMcompute
Riccatiequation
simulationLTIsystem
stablizabilityQ
strictobservercanonicalform
strictOCFAD
systemblockdiagonal
systemcheck
systemconcatenate
systemfeedback
systemoperation
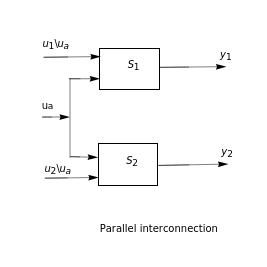
systemparallel
uniformobservabilityindices
ZDCF
ZigangPan`LinearSystems`
s
y
s
t
e
m
p
a
r
a
l
l
e
l
s
y
s
t
e
m
p
a
r
a
l
l
e
l
[
s
y
s
t
e
m
1
,
s
y
s
t
e
m
2
]
r
e
t
u
r
n
s
a
c
o
m
p
o
s
i
t
e
s
y
s
t
e
m
w
h
o
s
e
i
n
p
u
t
s
a
r
e
t
h
e
j
o
i
n
e
d
l
i
s
t
o
f
i
n
p
u
t
s
o
f
s
y
s
t
e
m
1
a
n
d
s
y
s
t
e
m
2
e
x
c
l
u
d
i
n
g
t
h
e
a
c
t
i
v
e
i
n
p
u
t
s
o
f
s
y
s
t
e
m
2
,
w
h
i
c
h
w
e
r
e
a
s
s
u
m
e
d
t
o
b
e
e
q
u
a
l
t
o
t
h
e
a
c
t
i
v
e
i
n
p
u
t
s
o
f
s
y
s
t
e
m
1
,
a
n
d
o
u
t
p
u
t
s
a
r
e
t
h
e
j
o
i
n
e
d
l
i
s
t
o
f
o
u
t
p
u
t
s
o
f
s
y
s
t
e
m
1
a
n
d
s
y
s
t
e
m
2
.
N
o
t
e
t
h
a
t
t
h
e
a
c
t
i
v
e
i
n
p
u
t
s
o
f
s
y
s
t
e
m
1
a
n
d
s
y
s
t
e
m
2
m
u
s
t
a
d
m
i
t
t
h
e
s
a
m
e
c
a
t
e
g
o
r
i
z
a
t
i
o
n
(
e
a
c
h
e
l
e
m
e
n
t
i
n
a
c
t
i
v
e
i
n
p
u
t
s
a
r
e
b
o
t
h
c
o
n
t
r
o
l
i
n
p
u
t
s
o
r
b
o
t
h
d
i
s
t
u
r
b
a
n
c
e
i
n
p
u
t
s
f
o
r
b
o
t
h
s
y
s
t
e
m
s
)
.
S
e
e
i
l
l
u
s
t
r
a
t
i
o
n
b
e
l
o
w
.
Examples
(
1
)
Basic Examples
(
1
)
I
n
[
1
]
:
=
s
y
s
t
e
m
=
{
{
x
1
,
x
2
,
x
3
}
,
{
u
1
,
u
2
,
w
1
,
w
2
}
,
{
y
1
,
y
2
,
z
1
,
z
2
}
,
{
{
-
1
,
2
,
0
,
0
,
0
,
0
,
1
}
,
{
-
2
,
-
1
,
1
,
1
,
1
,
1
,
0
}
,
{
-
1
,
-
2
,
-
3
,
-
1
,
1
,
1
,
1
}
,
{
1
,
0
,
0
,
0
,
0
,
1
,
0
}
,
{
0
,
1
,
0
,
0
,
0
,
0
,
1
}
,
{
1
,
0
,
0
,
0
,
0
,
0
,
0
}
,
{
0
,
1
,
0
,
0
,
0
,
0
,
0
}
}
,
{
1
,
2
}
,
{
1
,
2
}
,
{
1
,
2
}
,
{
3
,
4
}
,
{
1
,
2
}
,
{
3
,
4
}
}
;
I
n
[
2
]
:
=
s
y
s
t
e
m
1
=
{
{
x
1
}
,
{
u
1
,
u
2
,
w
}
,
{
y
,
z
}
,
{
{
-
1
,
1
,
0
,
1
}
,
{
1
,
0
,
0
,
1
}
,
{
1
,
0
,
0
,
0
}
}
,
{
1
,
2
}
,
{
1
}
,
{
1
,
2
}
,
{
3
}
,
{
1
}
,
{
2
}
}
O
u
t
[
2
]
=
{
{
x
1
}
,
{
u
1
,
u
2
,
w
}
,
{
y
,
z
}
,
{
{
-
1
,
1
,
0
,
1
}
,
{
1
,
0
,
0
,
1
}
,
{
1
,
0
,
0
,
0
}
}
,
{
1
,
2
}
,
{
1
}
,
{
1
,
2
}
,
{
3
}
,
{
1
}
,
{
2
}
}
I
n
[
3
]
:
=
s
y
s
t
e
m
o
p
e
r
a
t
i
o
n
s
y
s
t
e
m
p
a
r
a
l
l
e
l
[
s
y
s
t
e
m
,
s
y
s
t
e
m
1
]
,
{
"
V
i
e
w
"
}
;
A
c
t
i
v
e
a
1
a
2
T
y
p
e
s
1
s
2
s
3
s
4
c
1
c
2
d
1
d
2
d
3
n
a
m
e
s
x
1
1
x
2
1
x
3
1
x
1
2
u
1
u
2
w
1
w
2
w
s
1
x
1
1
-
1
2
0
0
0
0
0
1
0
s
2
x
2
1
-
2
-
1
1
0
1
1
1
0
0
s
3
x
3
1
-
1
-
2
-
3
0
-
1
1
1
1
0
s
4
x
1
2
0
0
0
-
1
1
0
0
0
1
a
1
m
1
y
1
1
0
0
0
0
0
1
0
0
a
2
m
2
y
2
0
1
0
0
0
0
0
1
0
c
1
z
1
1
0
0
0
0
0
0
0
0
c
2
z
2
0
1
0
0
0
0
0
0
0
a
3
m
3
y
0
0
0
1
0
0
0
0
1
c
3
z
0
0
0
1
0
0
0
0
0
S
e
e
A
l
s
o
s
y
s
t
e
m
c
h
e
c
k
▪
s
y
s
t
e
m
b
l
o
c
k
d
i
a
g
o
n
a
l
▪
s
y
s
t
e
m
c
o
n
c
a
t
e
n
a
t
e
▪
s
y
s
t
e
m
f
e
e
d
b
a
c
k
"
"