Wolfram Language Paclet Repository
Community-contributed installable additions to the Wolfram Language
simulationLTIsystem |
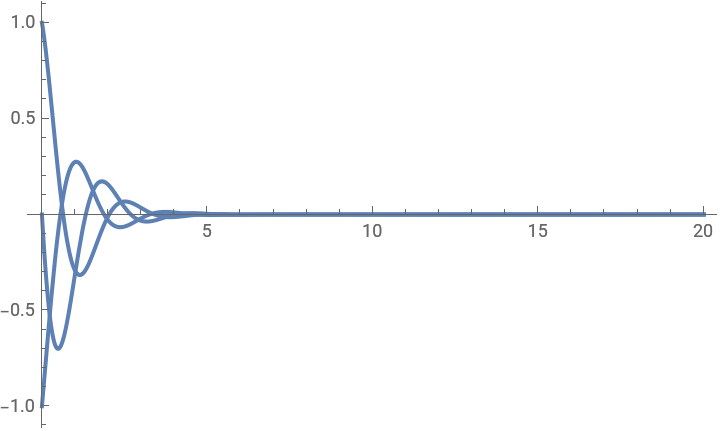
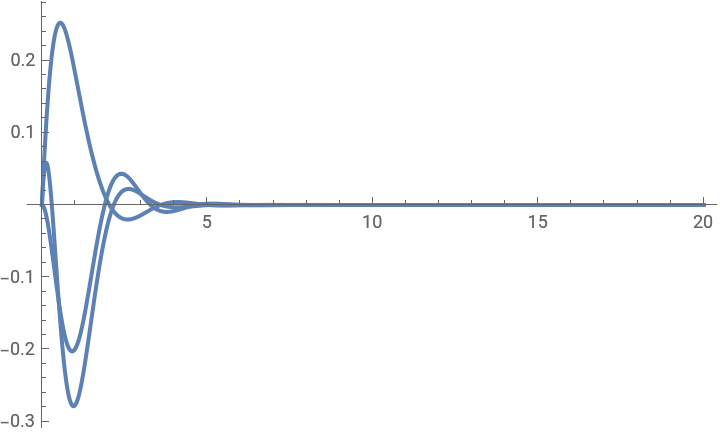
| {systemstates,controllerstates,disturbancestates,controlinput,disturbanceinput,measurementoutput,controlledoutput,controllersignals}=simulationLTIsystem[system,ICsystem,controller,ICcontroller,disturbancedynamics,ICdisturbance,t0,tf] system controller disturbancedynamics system controller disturbancedynamics ICsystem ICcontroller ICdisturbance t0 tf system controller disturbancedynamics system system system system | |
controllercanonicalform |
observercanonicalform |
gainsystem |
simulationLTIsystem |
 |
|