Wolfram Function Repository
Instant-use add-on functions for the Wolfram Language
Function Repository Resource:
Manipulate parameters or initial values in plots of model simulation results
ResourceFunction["SystemModelManipulate"][model] creates a Manipulate object from model showing the resulting default plots of a simulation with controllers for the top-level parameters and initial values. | |
ResourceFunction["SystemModelManipulate"][model,{u}] creates a control only for the top-level parameter or variable u. | |
ResourceFunction["SystemModelManipulate"][model,{u,umin,umax}] allows the value for u to vary between umin and umax. | |
ResourceFunction["SystemModelManipulate"][model,{{u,uinit},umin,umax,…}] takes the initial value of u to be uinit. | |
ResourceFunction["SystemModelManipulate"][model,{u,{u1,u2,…}}] allows u to take on discrete values u1,u2,…. | |
ResourceFunction["SystemModelManipulate"][model,{u,func}] creates a control from the function func. | |
ResourceFunction["SystemModelManipulate"][model,{u,…},{v,…},…] provides controls to manipuate each u,v,…. |
| Appearance | "Open" | appearance of controls for real and integer values |
| ContinuousAction | False | whether to update continuously when controls are changed |
| SynchronousInitialization | False | whether to perform initialization synchronously |
| SynchronousUpdating | False | whether to update synchronously |
Create a dynamic interface for a model simulation:
| In[1]:= | ![ResourceFunction["SystemModelManipulate"][\!\(\*
GraphicsBox[
TagBox[
TooltipBox[
DynamicModuleBox[{WSM`Typeset`PackagePrivate`p$86383 = {
InsetBox[
GraphicsBox[{
RGBColor[
0.25098039215686274`, 0.25098039215686274`, 0.25098039215686274`],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"x'\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"f(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["``````",
Style["x'", Italic, FontFamily -> "Times New Roman", FontSize -> 12], Style["=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["f(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[1, 10]}, {0, 0.1}]],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"0=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"g(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["````",
Style["0=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["g(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[-1, 10]}, {0, -0.1}]]}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-2, 5],
Rational[2, 5]}, {
Rational[-1, 5],
Rational[2, 5]}}, {{-0.4, 0.4}, {-0.2, 0.4}}], ImageSize -> NCache[{
UpTo[130],
Rational[171, 4]}, {
UpTo[130], 42.75}]], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {57., 42.75}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"MorsePotential\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -35.875},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-49.5, -46.375}, {49.5, 30.375}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}, WSM`Typeset`PackagePrivate`appearanceState$86383 = "Minimal", WSM`Typeset`PackagePrivate`expandedeval$86383 = False, WSM`Typeset`PackagePrivate`expandedprimitives$86383, WSM`Typeset`PackagePrivate`expandedopt$86383, WSM`Typeset`PackagePrivate`expandedsize$86383 = {101., 78.75}, WSM`Typeset`PackagePrivate`expandedrange$86383 = {{-50.5, 50.5}, {-47.375, 31.375}}},
DynamicWrapperBox[
DynamicBox[{WSM`Typeset`PackagePrivate`p$86383,
Which[
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$86383 === "Minimal"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquarePlusIconMedium"]], ButtonFunction :> (
If[WSM`Typeset`PackagePrivate`expandedeval$86383 === False, If[
TrueQ[WSMLink`Private`$WSMLinkIsLoaded], WSM`Typeset`PackagePrivate`appearanceState$86383 = "Eval"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"354659cc-746a-4aca-ba50-ff1fa45a2bf7"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedsize$86383, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$86383}]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedrange$86383, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$86383}]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null, WSM`Typeset`PackagePrivate`appearanceState$86383 = "Expanded"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"354659cc-746a-4aca-ba50-ff1fa45a2bf7"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = WSM`Typeset`PackagePrivate`expandedsize$86383; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = WSM`Typeset`PackagePrivate`expandedrange$86383; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{6, -6},
Scaled[{0, 1}]],
Scaled[{0, 1}]],
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$86383 === "Expanded"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquareMinusIconMedium"]], ButtonFunction :> (
WSM`Typeset`PackagePrivate`appearanceState$86383 = "Minimal"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"354659cc-746a-4aca-ba50-ff1fa45a2bf7"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = {101., 78.75}; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = {{-50.5, 50.5}, {-47.375, 31.375}}; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{10, -10},
Scaled[{0, 1}]]], True, {}]},
ImageSizeCache->{{0.5, 100.5}, {-41.25, 36.5}},
TrackedSymbols:>{WSM`Typeset`PackagePrivate`p$86383}], Which[WSM`Typeset`PackagePrivate`appearanceState$86383 === "Minimal", WSM`Typeset`PackagePrivate`p$86383 = {
InsetBox[
GraphicsBox[{
RGBColor[
0.25098039215686274`, 0.25098039215686274`, 0.25098039215686274`],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"x'\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"f(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["``````",
Style["x'", Italic, FontFamily -> "Times New Roman", FontSize -> 12], Style["=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["f(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[1, 10]}, {0, 0.1}]],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"0=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"g(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["````",
Style["0=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["g(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[-1, 10]}, {0, -0.1}]]}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-2, 5],
Rational[2, 5]}, {
Rational[-1, 5],
Rational[2, 5]}}, {{-0.4, 0.4}, {-0.2, 0.4}}], ImageSize -> NCache[{
UpTo[130],
Rational[171, 4]}, {
UpTo[130], 42.75}]], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {57., 42.75}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"MorsePotential\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -35.875},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-49.5, -46.375}, {49.5, 30.375}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}; Null, WSM`Typeset`PackagePrivate`appearanceState$86383 === "Eval",
WSM`Typeset`PackagePrivate`p$86383 = {{
EdgeForm[
WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$86383, 1, 1],
Part[WSM`Typeset`PackagePrivate`expandedrange$86383, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$86383, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$86383, 2, 2]}, RoundingRadius -> Offset[5]]},
InsetBox[
Evaluate[
ToBoxes[
ProgressIndicator[Appearance -> "Percolate"], StandardForm]]]}; Module[{WSM`Typeset`PackagePrivate`md$}, {WSM`Typeset`PackagePrivate`expandedsize$86383, WSM`Typeset`PackagePrivate`md$} = WSM`Typeset`PackagePrivate`getExpandedGraphic[
"DocumentationExamples.Simulation.MorsePotential", "354659cc-746a-4aca-ba50-ff1fa45a2bf7"]; {WSM`Typeset`PackagePrivate`expandedprimitives$86383, WSM`Typeset`PackagePrivate`expandedopt$86383} = WSM`Typeset`PackagePrivate`separateGraphics[
WSM`Typeset`PackagePrivate`md$]; WSM`Typeset`PackagePrivate`expandedrange$86383 = Replace[PlotRange,
Flatten[WSM`Typeset`PackagePrivate`expandedopt$86383]]; WSM`Typeset`PackagePrivate`expandedeval$86383 = True; WSM`Typeset`PackagePrivate`expandedprimitives$86383 = Join[
WSM`Typeset`PackagePrivate`expandedprimitives$86383, {{ EdgeForm[WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$86383, 1, 1], Part[
WSM`Typeset`PackagePrivate`expandedrange$86383, 2,
1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$86383, 1,
2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$86383, 2, 2]}, RoundingRadius -> Offset[5]]},
With[{WSM`Typeset`PackagePrivate`leftmost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$86383, 1, 1], WSM`Typeset`PackagePrivate`bottommost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$86383, 2, 1]}, {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["MorsePotential", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm],
Offset[{12, 12}, {WSM`Typeset`PackagePrivate`leftmost$, WSM`Typeset`PackagePrivate`bottommost$}], {-1, 0}]}]}]; Null]; WSM`Typeset`PackagePrivate`appearanceState$86383 = "Expanded"; Null, WSM`Typeset`PackagePrivate`appearanceState$86383 === "Expanded", WSM`Typeset`PackagePrivate`p$86383 = WSM`Typeset`PackagePrivate`expandedprimitives$86383; Null]; Null,
ImageSizeCache->{{0.5, 100.5}, {-41.25, 36.5}},
SynchronousUpdating->False,
TrackedSymbols:>{WSM`Typeset`PackagePrivate`appearanceState$86383}],
Initialization:>(
WSM`Typeset`PackagePrivate`expandedeval$86383 = Not[
WSM`Typeset`PackagePrivate`expandedeval$86383]; WSM`Typeset`PackagePrivate`expandedeval$86383 = Not[
WSM`Typeset`PackagePrivate`expandedeval$86383]; Null)],
"DocumentationExamples.Simulation.MorsePotential"],
WSM`ModelTag["DocumentationExamples.Simulation.MorsePotential"]],
SelectWithContents -> True,
Editable -> False,
BoxID -> "354659cc-746a-4aca-ba50-ff1fa45a2bf7",
ContentSelectable->False,
DefaultBaseStyle->{"Graphics", FrontEnd`GraphicsHighlightColor -> RGBColor[0, 0.46775, 1], ComponentwiseContextMenu -> {"GraphicsBox" -> {
MenuItem[
"Copy Model",
KernelExecute[
CopyToClipboard[
ReleaseHold[
MakeExpression[
MakeBoxes[
SystemModel["DocumentationExamples.Simulation.MorsePotential"]], StandardForm]]]], MenuEvaluator -> Automatic],
MenuItem["Copy Model Name",
KernelExecute[
CopyToClipboard[(
"\"" <> "DocumentationExamples.Simulation.MorsePotential") <> "\""]], MenuEvaluator -> Automatic], Delimiter,
MenuItem["Simulate Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelSimulate", "[", "\"DocumentationExamples.Simulation.MorsePotential\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Preferred Plots in Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelPlot", "[", "\"DocumentationExamples.Simulation.MorsePotential\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Model Information",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModel", "[",
RowBox[{"\"DocumentationExamples.Simulation.MorsePotential\"", ",", "\"Summary\""}], "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]], Delimiter,
MenuItem["Open in System Modeler Model Center",
KernelExecute[
WSMLink`WSMModelCenter[
"DocumentationExamples.Simulation.MorsePotential"]], MenuEvaluator -> Automatic],
MenuItem["Open in System Modeler Simulation Center",
KernelExecute[
WSMLink`WSMSimulationCenter[
"DocumentationExamples.Simulation.MorsePotential"]], MenuEvaluator -> Automatic]}}},
ImageSize->{101., 78.75},
PlotRange->{{-50.5, 50.5}, {-47.375, 31.375}}]\)]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/3cf39c85e0f0f67d.png) |
| Out[1]= | 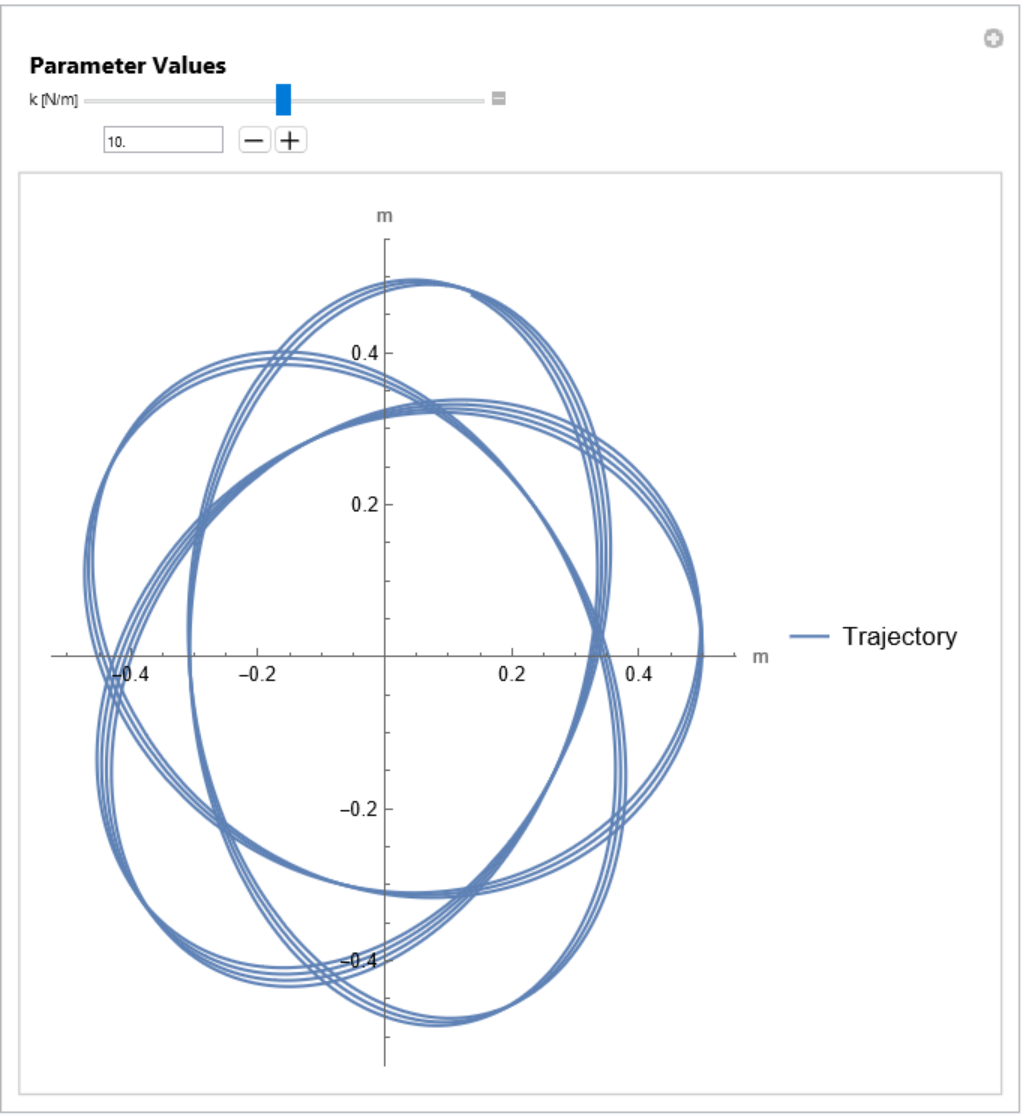 |
Manipulate an initial value in a simulation:
| In[2]:= | ![ResourceFunction["SystemModelManipulate"][\!\(\*
GraphicsBox[
TagBox[
TooltipBox[
DynamicModuleBox[{WSM`Typeset`PackagePrivate`p$80332 = {
InsetBox[
GraphicsBox[{{
RGBColor[0., 0.4666666666666667, 1.],
Thickness[
NCache[
Rational[1, 50], 0.02]],
LineBox[
NCache[{{
Rational[-7, 4], 0}, {0, 0}}, {{-1.75, 0}, {0, 0}}]],
LineBox[
NCache[{{
Rational[-7, 4],
Rational[7, 4]}, {
Rational[7, 4],
Rational[7, 4]}, {
Rational[7, 4],
Rational[-7, 4]}, {
Rational[-7, 4],
Rational[-7, 4]}, {
Rational[-7, 4],
Rational[7, 4]}}, {{-1.75, 1.75}, {1.75, 1.75}, {
1.75, -1.75}, {-1.75, -1.75}, {-1.75, 1.75}}]]}, { EdgeForm[None],
RGBColor[0., 0.4666666666666667, 1.],
DiskBox[
NCache[{
Rational[7, 4], 0}, {1.75, 0}],
NCache[
Rational[3, 8], 0.375]]}, {
EdgeForm[None],
GrayLevel[0.85],
RectangleBox[
NCache[{
Rational[-1, 2],
Rational[-1, 2]}, {-0.5, -0.5}],
NCache[{
Rational[1, 2],
Rational[1, 2]}, {0.5, 0.5}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[-1, 2]}, {-2.25, -0.5}],
NCache[{
Rational[-5, 4],
Rational[1, 2]}, {-1.25, 0.5}]],
RectangleBox[
NCache[{
Rational[-1, 2],
Rational[-9, 4]}, {-0.5, -2.25}],
NCache[{
Rational[1, 2],
Rational[-5, 4]}, {0.5, -1.25}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[-9, 4]}, {-2.25, -2.25}],
NCache[{
Rational[-5, 4],
Rational[-5, 4]}, {-1.25, -1.25}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[5, 4]}, {-2.25, 1.25}],
NCache[{
Rational[-5, 4],
Rational[9, 4]}, {-1.25, 2.25}]],
RectangleBox[
NCache[{
Rational[5, 4],
Rational[-9, 4]}, {1.25, -2.25}],
NCache[{
Rational[9, 4],
Rational[-5, 4]}, {2.25, -1.25}]],
TagBox[
PolygonBox[
NCache[{{
Rational[1, 2],
Rational[7, 4]}, {
Rational[-1, 2],
Rational[9, 4]}, {
Rational[-1, 2],
Rational[5, 4]}}, {{0.5, 1.75}, {-0.5, 2.25}, {-0.5, 1.25}}]], "Triangle"]}}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-9, 4],
Rational[9, 4]}, {
Rational[-9, 4],
Rational[15, 4]}}, {{-2.25, 2.25}, {-2.25, 3.75}}], ImageSize -> {
UpTo[130], 57}], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {42.75, 57.}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"BouncingBalls1D\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -43.},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-53., -53.5}, {53., 37.5}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}, WSM`Typeset`PackagePrivate`appearanceState$80332 = "Minimal", WSM`Typeset`PackagePrivate`expandedeval$80332 = False, WSM`Typeset`PackagePrivate`expandedprimitives$80332, WSM`Typeset`PackagePrivate`expandedopt$80332, WSM`Typeset`PackagePrivate`expandedsize$80332 = {108., 93.}, WSM`Typeset`PackagePrivate`expandedrange$80332 = {{-54., 54.}, {-54.5, 38.5}}},
DynamicWrapperBox[
DynamicBox[{WSM`Typeset`PackagePrivate`p$80332,
Which[
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$80332 === "Minimal"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquarePlusIconMedium"]], ButtonFunction :> (
If[WSM`Typeset`PackagePrivate`expandedeval$80332 === False, If[
TrueQ[WSMLink`Private`$WSMLinkIsLoaded], WSM`Typeset`PackagePrivate`appearanceState$80332 = "Eval"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"5303544f-de9c-4aef-a785-01d778c774be"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedsize$80332, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$80332}]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedrange$80332, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$80332}]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null, WSM`Typeset`PackagePrivate`appearanceState$80332 = "Expanded"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"5303544f-de9c-4aef-a785-01d778c774be"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = WSM`Typeset`PackagePrivate`expandedsize$80332; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = WSM`Typeset`PackagePrivate`expandedrange$80332; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{6, -6},
Scaled[{0, 1}]],
Scaled[{0, 1}]],
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$80332 === "Expanded"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquareMinusIconMedium"]], ButtonFunction :> (
WSM`Typeset`PackagePrivate`appearanceState$80332 = "Minimal"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"5303544f-de9c-4aef-a785-01d778c774be"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = {108., 93.}; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = {{-54., 54.}, {-54.5, 38.5}}; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{10, -10},
Scaled[{0, 1}]]], True, {}]},
ImageSizeCache->{{0.5, 107.5}, {-48.5, 43.5}},
TrackedSymbols:>{WSM`Typeset`PackagePrivate`p$80332}], Which[WSM`Typeset`PackagePrivate`appearanceState$80332 === "Minimal", WSM`Typeset`PackagePrivate`p$80332 = {
InsetBox[
GraphicsBox[{{
RGBColor[0., 0.4666666666666667, 1.],
Thickness[
NCache[
Rational[1, 50], 0.02]],
LineBox[
NCache[{{
Rational[-7, 4], 0}, {0, 0}}, {{-1.75, 0}, {0, 0}}]],
LineBox[
NCache[{{
Rational[-7, 4],
Rational[7, 4]}, {
Rational[7, 4],
Rational[7, 4]}, {
Rational[7, 4],
Rational[-7, 4]}, {
Rational[-7, 4],
Rational[-7, 4]}, {
Rational[-7, 4],
Rational[7, 4]}}, {{-1.75, 1.75}, {1.75, 1.75}, {
1.75, -1.75}, {-1.75, -1.75}, {-1.75, 1.75}}]]}, { EdgeForm[None],
RGBColor[0., 0.4666666666666667, 1.],
DiskBox[
NCache[{
Rational[7, 4], 0}, {1.75, 0}],
NCache[
Rational[3, 8], 0.375]]}, {
EdgeForm[None],
GrayLevel[0.85],
RectangleBox[
NCache[{
Rational[-1, 2],
Rational[-1, 2]}, {-0.5, -0.5}],
NCache[{
Rational[1, 2],
Rational[1, 2]}, {0.5, 0.5}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[-1, 2]}, {-2.25, -0.5}],
NCache[{
Rational[-5, 4],
Rational[1, 2]}, {-1.25, 0.5}]],
RectangleBox[
NCache[{
Rational[-1, 2],
Rational[-9, 4]}, {-0.5, -2.25}],
NCache[{
Rational[1, 2],
Rational[-5, 4]}, {0.5, -1.25}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[-9, 4]}, {-2.25, -2.25}],
NCache[{
Rational[-5, 4],
Rational[-5, 4]}, {-1.25, -1.25}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[5, 4]}, {-2.25, 1.25}],
NCache[{
Rational[-5, 4],
Rational[9, 4]}, {-1.25, 2.25}]],
RectangleBox[
NCache[{
Rational[5, 4],
Rational[-9, 4]}, {1.25, -2.25}],
NCache[{
Rational[9, 4],
Rational[-5, 4]}, {2.25, -1.25}]],
TagBox[
PolygonBox[
NCache[{{
Rational[1, 2],
Rational[7, 4]}, {
Rational[-1, 2],
Rational[9, 4]}, {
Rational[-1, 2],
Rational[5, 4]}}, {{0.5, 1.75}, {-0.5, 2.25}, {-0.5, 1.25}}]], "Triangle"]}}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-9, 4],
Rational[9, 4]}, {
Rational[-9, 4],
Rational[15, 4]}}, {{-2.25, 2.25}, {-2.25, 3.75}}], ImageSize -> {
UpTo[130], 57}], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {42.75, 57.}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"BouncingBalls1D\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -43.},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-53., -53.5}, {53., 37.5}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}; Null, WSM`Typeset`PackagePrivate`appearanceState$80332 === "Eval",
WSM`Typeset`PackagePrivate`p$80332 = {{
EdgeForm[
WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$80332, 1, 1],
Part[WSM`Typeset`PackagePrivate`expandedrange$80332, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$80332, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$80332, 2, 2]}, RoundingRadius -> Offset[5]]},
InsetBox[
Evaluate[
ToBoxes[
ProgressIndicator[Appearance -> "Percolate"], StandardForm]]]}; Module[{WSM`Typeset`PackagePrivate`md$}, {WSM`Typeset`PackagePrivate`expandedsize$80332, WSM`Typeset`PackagePrivate`md$} = WSM`Typeset`PackagePrivate`getExpandedGraphic[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D", "5303544f-de9c-4aef-a785-01d778c774be"]; {WSM`Typeset`PackagePrivate`expandedprimitives$80332, WSM`Typeset`PackagePrivate`expandedopt$80332} = WSM`Typeset`PackagePrivate`separateGraphics[
WSM`Typeset`PackagePrivate`md$]; WSM`Typeset`PackagePrivate`expandedrange$80332 = Replace[PlotRange,
Flatten[WSM`Typeset`PackagePrivate`expandedopt$80332]]; WSM`Typeset`PackagePrivate`expandedeval$80332 = True; WSM`Typeset`PackagePrivate`expandedprimitives$80332 = Join[
WSM`Typeset`PackagePrivate`expandedprimitives$80332, {{ EdgeForm[WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$80332, 1, 1], Part[
WSM`Typeset`PackagePrivate`expandedrange$80332, 2,
1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$80332, 1,
2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$80332, 2, 2]}, RoundingRadius -> Offset[5]]},
With[{WSM`Typeset`PackagePrivate`leftmost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$80332, 1, 1], WSM`Typeset`PackagePrivate`bottommost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$80332, 2, 1]}, {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["BouncingBalls1D", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm],
Offset[{12, 12}, {WSM`Typeset`PackagePrivate`leftmost$, WSM`Typeset`PackagePrivate`bottommost$}], {-1, 0}]}]}]; Null]; WSM`Typeset`PackagePrivate`appearanceState$80332 = "Expanded"; Null, WSM`Typeset`PackagePrivate`appearanceState$80332 === "Expanded", WSM`Typeset`PackagePrivate`p$80332 = WSM`Typeset`PackagePrivate`expandedprimitives$80332; Null]; Null,
ImageSizeCache->{{0.5, 107.5}, {-48.5, 43.5}},
SynchronousUpdating->False,
TrackedSymbols:>{WSM`Typeset`PackagePrivate`appearanceState$80332}],
Initialization:>(
WSM`Typeset`PackagePrivate`expandedeval$80332 = Not[
WSM`Typeset`PackagePrivate`expandedeval$80332]; WSM`Typeset`PackagePrivate`expandedeval$80332 = Not[
WSM`Typeset`PackagePrivate`expandedeval$80332]; Null)],
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"],
WSM`ModelTag[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"]],
SelectWithContents -> True,
Editable -> False,
BoxID -> "5303544f-de9c-4aef-a785-01d778c774be",
ContentSelectable->False,
DefaultBaseStyle->{"Graphics", FrontEnd`GraphicsHighlightColor -> RGBColor[0, 0.46775, 1], ComponentwiseContextMenu -> {"GraphicsBox" -> {
MenuItem[
"Copy Model",
KernelExecute[
CopyToClipboard[
ReleaseHold[
MakeExpression[
MakeBoxes[
SystemModel[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"]], StandardForm]]]], MenuEvaluator -> Automatic],
MenuItem["Copy Model Name",
KernelExecute[
CopyToClipboard[(
"\"" <> "EducationExamples.Physics.BouncingBalls.BouncingBalls1D") <> "\""]], MenuEvaluator -> Automatic], Delimiter,
MenuItem["Simulate Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelSimulate", "[", "\"EducationExamples.Physics.BouncingBalls.BouncingBalls1D\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Preferred Plots in Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelPlot", "[", "\"EducationExamples.Physics.BouncingBalls.BouncingBalls1D\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Model Information",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModel", "[",
RowBox[{"\"EducationExamples.Physics.BouncingBalls.BouncingBalls1D\"",
",", "\"Summary\""}], "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]], Delimiter,
MenuItem["Open in System Modeler Model Center",
KernelExecute[
WSMLink`WSMModelCenter[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"]], MenuEvaluator -> Automatic],
MenuItem["Open in System Modeler Simulation Center",
KernelExecute[
WSMLink`WSMSimulationCenter[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"]], MenuEvaluator -> Automatic]}}},
ImageSize->{108., 93.},
PlotRange->{{-54., 54.}, {-54.5, 38.5}}]\), {"h"}]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/0dcf3767c6721127.png) |
| Out[2]= | 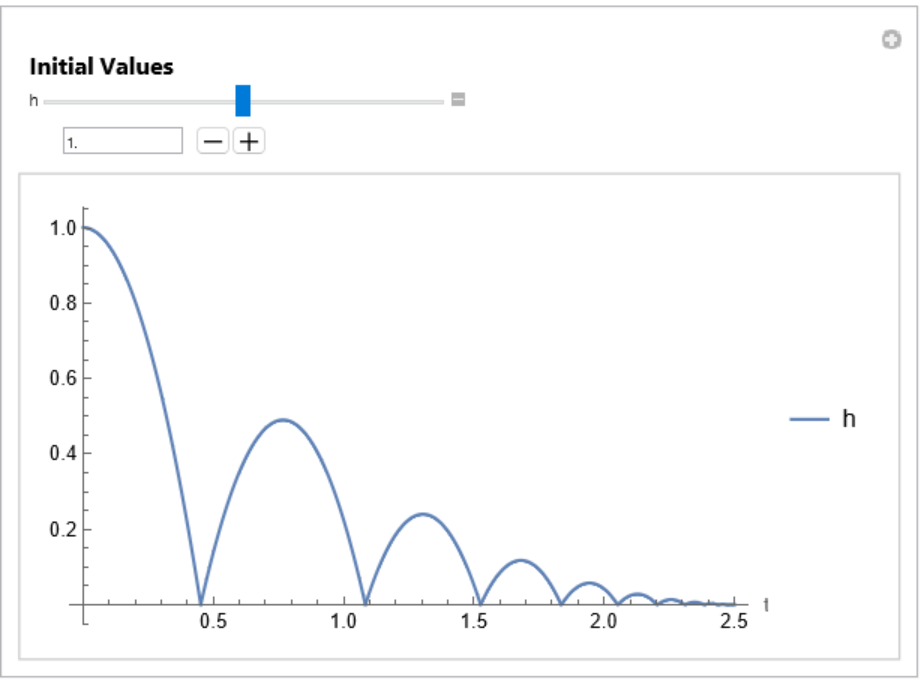 |
Specify the model by name and manipulate a specific parameter value in a simulation:
| In[3]:= |
| Out[3]= |  |
All default plots are shown by default:
| In[4]:= | ![ResourceFunction["SystemModelManipulate"][\!\(\*
GraphicsBox[
TagBox[
TooltipBox[
DynamicModuleBox[{WSM`Typeset`PackagePrivate`p$89335 = {
InsetBox[
GraphicsBox[{{
RGBColor[0., 0.4666666666666667, 1.],
Thickness[
NCache[
Rational[1, 50], 0.02]],
LineBox[
NCache[{{
Rational[-7, 4], 0}, {0, 0}}, {{-1.75, 0}, {0, 0}}]],
LineBox[
NCache[{{
Rational[-7, 4],
Rational[7, 4]}, {
Rational[7, 4],
Rational[7, 4]}, {
Rational[7, 4],
Rational[-7, 4]}, {
Rational[-7, 4],
Rational[-7, 4]}, {
Rational[-7, 4],
Rational[7, 4]}}, {{-1.75, 1.75}, {1.75, 1.75}, {
1.75, -1.75}, {-1.75, -1.75}, {-1.75, 1.75}}]]}, { EdgeForm[None],
RGBColor[0., 0.4666666666666667, 1.],
DiskBox[
NCache[{
Rational[7, 4], 0}, {1.75, 0}],
NCache[
Rational[3, 8], 0.375]]}, {
EdgeForm[None],
GrayLevel[0.85],
RectangleBox[
NCache[{
Rational[-1, 2],
Rational[-1, 2]}, {-0.5, -0.5}],
NCache[{
Rational[1, 2],
Rational[1, 2]}, {0.5, 0.5}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[-1, 2]}, {-2.25, -0.5}],
NCache[{
Rational[-5, 4],
Rational[1, 2]}, {-1.25, 0.5}]],
RectangleBox[
NCache[{
Rational[-1, 2],
Rational[-9, 4]}, {-0.5, -2.25}],
NCache[{
Rational[1, 2],
Rational[-5, 4]}, {0.5, -1.25}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[-9, 4]}, {-2.25, -2.25}],
NCache[{
Rational[-5, 4],
Rational[-5, 4]}, {-1.25, -1.25}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[5, 4]}, {-2.25, 1.25}],
NCache[{
Rational[-5, 4],
Rational[9, 4]}, {-1.25, 2.25}]],
RectangleBox[
NCache[{
Rational[5, 4],
Rational[-9, 4]}, {1.25, -2.25}],
NCache[{
Rational[9, 4],
Rational[-5, 4]}, {2.25, -1.25}]],
TagBox[
PolygonBox[
NCache[{{
Rational[1, 2],
Rational[7, 4]}, {
Rational[-1, 2],
Rational[9, 4]}, {
Rational[-1, 2],
Rational[5, 4]}}, {{0.5, 1.75}, {-0.5, 2.25}, {-0.5, 1.25}}]], "Triangle"]}}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-9, 4],
Rational[9, 4]}, {
Rational[-9, 4],
Rational[15, 4]}}, {{-2.25, 2.25}, {-2.25, 3.75}}], ImageSize -> {
UpTo[130], 57}], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {42.75, 57.}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"BouncingBalls1D\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -43.},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-53., -53.5}, {53., 37.5}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}, WSM`Typeset`PackagePrivate`appearanceState$89335 = "Minimal", WSM`Typeset`PackagePrivate`expandedeval$89335 = False, WSM`Typeset`PackagePrivate`expandedprimitives$89335, WSM`Typeset`PackagePrivate`expandedopt$89335, WSM`Typeset`PackagePrivate`expandedsize$89335 = {108., 93.}, WSM`Typeset`PackagePrivate`expandedrange$89335 = {{-54., 54.}, {-54.5, 38.5}}},
DynamicWrapperBox[
DynamicBox[{WSM`Typeset`PackagePrivate`p$89335,
Which[
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$89335 === "Minimal"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquarePlusIconMedium"]], ButtonFunction :> (
If[WSM`Typeset`PackagePrivate`expandedeval$89335 === False, If[
TrueQ[WSMLink`Private`$WSMLinkIsLoaded], WSM`Typeset`PackagePrivate`appearanceState$89335 = "Eval"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"5dc53b21-299a-48e9-b672-b1f8219ff30c"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedsize$89335, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$89335}]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedrange$89335, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$89335}]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null, WSM`Typeset`PackagePrivate`appearanceState$89335 = "Expanded"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"5dc53b21-299a-48e9-b672-b1f8219ff30c"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = WSM`Typeset`PackagePrivate`expandedsize$89335; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = WSM`Typeset`PackagePrivate`expandedrange$89335; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{6, -6},
Scaled[{0, 1}]],
Scaled[{0, 1}]],
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$89335 === "Expanded"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquareMinusIconMedium"]], ButtonFunction :> (
WSM`Typeset`PackagePrivate`appearanceState$89335 = "Minimal"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"5dc53b21-299a-48e9-b672-b1f8219ff30c"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = {108., 93.}; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = {{-54., 54.}, {-54.5, 38.5}}; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{10, -10},
Scaled[{0, 1}]]], True, {}]},
ImageSizeCache->{{0.5, 107.5}, {-48.5, 43.5}},
TrackedSymbols:>{WSM`Typeset`PackagePrivate`p$89335}], Which[WSM`Typeset`PackagePrivate`appearanceState$89335 === "Minimal", WSM`Typeset`PackagePrivate`p$89335 = {
InsetBox[
GraphicsBox[{{
RGBColor[0., 0.4666666666666667, 1.],
Thickness[
NCache[
Rational[1, 50], 0.02]],
LineBox[
NCache[{{
Rational[-7, 4], 0}, {0, 0}}, {{-1.75, 0}, {0, 0}}]],
LineBox[
NCache[{{
Rational[-7, 4],
Rational[7, 4]}, {
Rational[7, 4],
Rational[7, 4]}, {
Rational[7, 4],
Rational[-7, 4]}, {
Rational[-7, 4],
Rational[-7, 4]}, {
Rational[-7, 4],
Rational[7, 4]}}, {{-1.75, 1.75}, {1.75, 1.75}, {
1.75, -1.75}, {-1.75, -1.75}, {-1.75, 1.75}}]]}, { EdgeForm[None],
RGBColor[0., 0.4666666666666667, 1.],
DiskBox[
NCache[{
Rational[7, 4], 0}, {1.75, 0}],
NCache[
Rational[3, 8], 0.375]]}, {
EdgeForm[None],
GrayLevel[0.85],
RectangleBox[
NCache[{
Rational[-1, 2],
Rational[-1, 2]}, {-0.5, -0.5}],
NCache[{
Rational[1, 2],
Rational[1, 2]}, {0.5, 0.5}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[-1, 2]}, {-2.25, -0.5}],
NCache[{
Rational[-5, 4],
Rational[1, 2]}, {-1.25, 0.5}]],
RectangleBox[
NCache[{
Rational[-1, 2],
Rational[-9, 4]}, {-0.5, -2.25}],
NCache[{
Rational[1, 2],
Rational[-5, 4]}, {0.5, -1.25}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[-9, 4]}, {-2.25, -2.25}],
NCache[{
Rational[-5, 4],
Rational[-5, 4]}, {-1.25, -1.25}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[5, 4]}, {-2.25, 1.25}],
NCache[{
Rational[-5, 4],
Rational[9, 4]}, {-1.25, 2.25}]],
RectangleBox[
NCache[{
Rational[5, 4],
Rational[-9, 4]}, {1.25, -2.25}],
NCache[{
Rational[9, 4],
Rational[-5, 4]}, {2.25, -1.25}]],
TagBox[
PolygonBox[
NCache[{{
Rational[1, 2],
Rational[7, 4]}, {
Rational[-1, 2],
Rational[9, 4]}, {
Rational[-1, 2],
Rational[5, 4]}}, {{0.5, 1.75}, {-0.5, 2.25}, {-0.5, 1.25}}]], "Triangle"]}}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-9, 4],
Rational[9, 4]}, {
Rational[-9, 4],
Rational[15, 4]}}, {{-2.25, 2.25}, {-2.25, 3.75}}], ImageSize -> {
UpTo[130], 57}], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {42.75, 57.}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"BouncingBalls1D\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -43.},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-53., -53.5}, {53., 37.5}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}; Null, WSM`Typeset`PackagePrivate`appearanceState$89335 === "Eval",
WSM`Typeset`PackagePrivate`p$89335 = {{
EdgeForm[
WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 1, 1],
Part[WSM`Typeset`PackagePrivate`expandedrange$89335, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$89335, 2, 2]}, RoundingRadius -> Offset[5]]},
InsetBox[
Evaluate[
ToBoxes[
ProgressIndicator[Appearance -> "Percolate"], StandardForm]]]}; Module[{WSM`Typeset`PackagePrivate`md$}, {WSM`Typeset`PackagePrivate`expandedsize$89335, WSM`Typeset`PackagePrivate`md$} = WSM`Typeset`PackagePrivate`getExpandedGraphic[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D", "5dc53b21-299a-48e9-b672-b1f8219ff30c"]; {WSM`Typeset`PackagePrivate`expandedprimitives$89335, WSM`Typeset`PackagePrivate`expandedopt$89335} = WSM`Typeset`PackagePrivate`separateGraphics[
WSM`Typeset`PackagePrivate`md$]; WSM`Typeset`PackagePrivate`expandedrange$89335 = Replace[PlotRange,
Flatten[WSM`Typeset`PackagePrivate`expandedopt$89335]]; WSM`Typeset`PackagePrivate`expandedeval$89335 = True; WSM`Typeset`PackagePrivate`expandedprimitives$89335 = Join[
WSM`Typeset`PackagePrivate`expandedprimitives$89335, {{ EdgeForm[WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 1, 1], Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 2,
1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 1,
2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$89335, 2, 2]}, RoundingRadius -> Offset[5]]},
With[{WSM`Typeset`PackagePrivate`leftmost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 1, 1], WSM`Typeset`PackagePrivate`bottommost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 2, 1]}, {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["BouncingBalls1D", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm],
Offset[{12, 12}, {WSM`Typeset`PackagePrivate`leftmost$, WSM`Typeset`PackagePrivate`bottommost$}], {-1, 0}]}]}]; Null]; WSM`Typeset`PackagePrivate`appearanceState$89335 = "Expanded"; Null, WSM`Typeset`PackagePrivate`appearanceState$89335 === "Expanded", WSM`Typeset`PackagePrivate`p$89335 = WSM`Typeset`PackagePrivate`expandedprimitives$89335; Null]; Null,
ImageSizeCache->{{0.5, 107.5}, {-48.5, 43.5}},
SynchronousUpdating->False,
TrackedSymbols:>{WSM`Typeset`PackagePrivate`appearanceState$89335}],
Initialization:>(
WSM`Typeset`PackagePrivate`expandedeval$89335 = Not[
WSM`Typeset`PackagePrivate`expandedeval$89335]; WSM`Typeset`PackagePrivate`expandedeval$89335 = Not[
WSM`Typeset`PackagePrivate`expandedeval$89335]; Null)],
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"],
WSM`ModelTag[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"]],
SelectWithContents -> True,
Editable -> False,
BoxID -> "5dc53b21-299a-48e9-b672-b1f8219ff30c",
ContentSelectable->False,
DefaultBaseStyle->{"Graphics", FrontEnd`GraphicsHighlightColor -> RGBColor[0, 0.46775, 1], ComponentwiseContextMenu -> {"GraphicsBox" -> {
MenuItem[
"Copy Model",
KernelExecute[
CopyToClipboard[
ReleaseHold[
MakeExpression[
MakeBoxes[
SystemModel[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"]], StandardForm]]]], MenuEvaluator -> Automatic],
MenuItem["Copy Model Name",
KernelExecute[
CopyToClipboard[(
"\"" <> "EducationExamples.Physics.BouncingBalls.BouncingBalls1D") <> "\""]], MenuEvaluator -> Automatic], Delimiter,
MenuItem["Simulate Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelSimulate", "[", "\"EducationExamples.Physics.BouncingBalls.BouncingBalls1D\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Preferred Plots in Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelPlot", "[", "\"EducationExamples.Physics.BouncingBalls.BouncingBalls1D\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Model Information",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModel", "[",
RowBox[{"\"EducationExamples.Physics.BouncingBalls.BouncingBalls1D\"",
",", "\"Summary\""}], "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]], Delimiter,
MenuItem["Open in System Modeler Model Center",
KernelExecute[
WSMLink`WSMModelCenter[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"]], MenuEvaluator -> Automatic],
MenuItem["Open in System Modeler Simulation Center",
KernelExecute[
WSMLink`WSMSimulationCenter[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"]], MenuEvaluator -> Automatic]}}},
ImageSize->{108., 93.},
PlotRange->{{-54., 54.}, {-54.5, 38.5}}]\), {"h"}]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/59b38eb79c733afc.png) |
| Out[4]= | 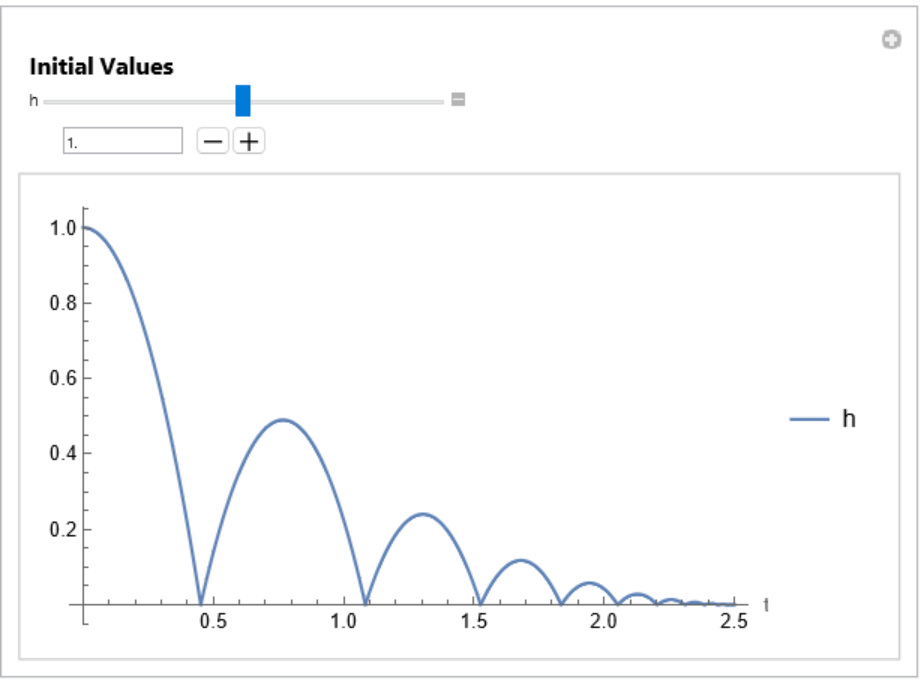 |
Manipulate all plots individually with a "Plots" control:
| In[5]:= | ![ResourceFunction["SystemModelManipulate"][\!\(\*
GraphicsBox[
TagBox[
TooltipBox[
DynamicModuleBox[{WSM`Typeset`PackagePrivate`p$89335 = {
InsetBox[
GraphicsBox[{{
RGBColor[0., 0.4666666666666667, 1.],
Thickness[
NCache[
Rational[1, 50], 0.02]],
LineBox[
NCache[{{
Rational[-7, 4], 0}, {0, 0}}, {{-1.75, 0}, {0, 0}}]],
LineBox[
NCache[{{
Rational[-7, 4],
Rational[7, 4]}, {
Rational[7, 4],
Rational[7, 4]}, {
Rational[7, 4],
Rational[-7, 4]}, {
Rational[-7, 4],
Rational[-7, 4]}, {
Rational[-7, 4],
Rational[7, 4]}}, {{-1.75, 1.75}, {1.75, 1.75}, {
1.75, -1.75}, {-1.75, -1.75}, {-1.75, 1.75}}]]}, { EdgeForm[None],
RGBColor[0., 0.4666666666666667, 1.],
DiskBox[
NCache[{
Rational[7, 4], 0}, {1.75, 0}],
NCache[
Rational[3, 8], 0.375]]}, {
EdgeForm[None],
GrayLevel[0.85],
RectangleBox[
NCache[{
Rational[-1, 2],
Rational[-1, 2]}, {-0.5, -0.5}],
NCache[{
Rational[1, 2],
Rational[1, 2]}, {0.5, 0.5}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[-1, 2]}, {-2.25, -0.5}],
NCache[{
Rational[-5, 4],
Rational[1, 2]}, {-1.25, 0.5}]],
RectangleBox[
NCache[{
Rational[-1, 2],
Rational[-9, 4]}, {-0.5, -2.25}],
NCache[{
Rational[1, 2],
Rational[-5, 4]}, {0.5, -1.25}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[-9, 4]}, {-2.25, -2.25}],
NCache[{
Rational[-5, 4],
Rational[-5, 4]}, {-1.25, -1.25}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[5, 4]}, {-2.25, 1.25}],
NCache[{
Rational[-5, 4],
Rational[9, 4]}, {-1.25, 2.25}]],
RectangleBox[
NCache[{
Rational[5, 4],
Rational[-9, 4]}, {1.25, -2.25}],
NCache[{
Rational[9, 4],
Rational[-5, 4]}, {2.25, -1.25}]],
TagBox[
PolygonBox[
NCache[{{
Rational[1, 2],
Rational[7, 4]}, {
Rational[-1, 2],
Rational[9, 4]}, {
Rational[-1, 2],
Rational[5, 4]}}, {{0.5, 1.75}, {-0.5, 2.25}, {-0.5, 1.25}}]], "Triangle"]}}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-9, 4],
Rational[9, 4]}, {
Rational[-9, 4],
Rational[15, 4]}}, {{-2.25, 2.25}, {-2.25, 3.75}}], ImageSize -> {
UpTo[130], 57}], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {42.75, 57.}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"BouncingBalls1D\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -43.},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-53., -53.5}, {53., 37.5}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}, WSM`Typeset`PackagePrivate`appearanceState$89335 = "Minimal", WSM`Typeset`PackagePrivate`expandedeval$89335 = False, WSM`Typeset`PackagePrivate`expandedprimitives$89335, WSM`Typeset`PackagePrivate`expandedopt$89335, WSM`Typeset`PackagePrivate`expandedsize$89335 = {108., 93.}, WSM`Typeset`PackagePrivate`expandedrange$89335 = {{-54., 54.}, {-54.5, 38.5}}},
DynamicWrapperBox[
DynamicBox[{WSM`Typeset`PackagePrivate`p$89335,
Which[
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$89335 === "Minimal"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquarePlusIconMedium"]], ButtonFunction :> (
If[WSM`Typeset`PackagePrivate`expandedeval$89335 === False, If[
TrueQ[WSMLink`Private`$WSMLinkIsLoaded], WSM`Typeset`PackagePrivate`appearanceState$89335 = "Eval"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"5dc53b21-299a-48e9-b672-b1f8219ff30c"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedsize$89335, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$89335}]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedrange$89335, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$89335}]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null, WSM`Typeset`PackagePrivate`appearanceState$89335 = "Expanded"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"5dc53b21-299a-48e9-b672-b1f8219ff30c"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = WSM`Typeset`PackagePrivate`expandedsize$89335; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = WSM`Typeset`PackagePrivate`expandedrange$89335; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{6, -6},
Scaled[{0, 1}]],
Scaled[{0, 1}]],
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$89335 === "Expanded"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquareMinusIconMedium"]], ButtonFunction :> (
WSM`Typeset`PackagePrivate`appearanceState$89335 = "Minimal"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"5dc53b21-299a-48e9-b672-b1f8219ff30c"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = {108., 93.}; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = {{-54., 54.}, {-54.5, 38.5}}; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{10, -10},
Scaled[{0, 1}]]], True, {}]},
ImageSizeCache->{{0.5, 107.5}, {-48.5, 43.5}},
TrackedSymbols:>{WSM`Typeset`PackagePrivate`p$89335}], Which[WSM`Typeset`PackagePrivate`appearanceState$89335 === "Minimal", WSM`Typeset`PackagePrivate`p$89335 = {
InsetBox[
GraphicsBox[{{
RGBColor[0., 0.4666666666666667, 1.],
Thickness[
NCache[
Rational[1, 50], 0.02]],
LineBox[
NCache[{{
Rational[-7, 4], 0}, {0, 0}}, {{-1.75, 0}, {0, 0}}]],
LineBox[
NCache[{{
Rational[-7, 4],
Rational[7, 4]}, {
Rational[7, 4],
Rational[7, 4]}, {
Rational[7, 4],
Rational[-7, 4]}, {
Rational[-7, 4],
Rational[-7, 4]}, {
Rational[-7, 4],
Rational[7, 4]}}, {{-1.75, 1.75}, {1.75, 1.75}, {
1.75, -1.75}, {-1.75, -1.75}, {-1.75, 1.75}}]]}, { EdgeForm[None],
RGBColor[0., 0.4666666666666667, 1.],
DiskBox[
NCache[{
Rational[7, 4], 0}, {1.75, 0}],
NCache[
Rational[3, 8], 0.375]]}, {
EdgeForm[None],
GrayLevel[0.85],
RectangleBox[
NCache[{
Rational[-1, 2],
Rational[-1, 2]}, {-0.5, -0.5}],
NCache[{
Rational[1, 2],
Rational[1, 2]}, {0.5, 0.5}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[-1, 2]}, {-2.25, -0.5}],
NCache[{
Rational[-5, 4],
Rational[1, 2]}, {-1.25, 0.5}]],
RectangleBox[
NCache[{
Rational[-1, 2],
Rational[-9, 4]}, {-0.5, -2.25}],
NCache[{
Rational[1, 2],
Rational[-5, 4]}, {0.5, -1.25}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[-9, 4]}, {-2.25, -2.25}],
NCache[{
Rational[-5, 4],
Rational[-5, 4]}, {-1.25, -1.25}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[5, 4]}, {-2.25, 1.25}],
NCache[{
Rational[-5, 4],
Rational[9, 4]}, {-1.25, 2.25}]],
RectangleBox[
NCache[{
Rational[5, 4],
Rational[-9, 4]}, {1.25, -2.25}],
NCache[{
Rational[9, 4],
Rational[-5, 4]}, {2.25, -1.25}]],
TagBox[
PolygonBox[
NCache[{{
Rational[1, 2],
Rational[7, 4]}, {
Rational[-1, 2],
Rational[9, 4]}, {
Rational[-1, 2],
Rational[5, 4]}}, {{0.5, 1.75}, {-0.5, 2.25}, {-0.5, 1.25}}]], "Triangle"]}}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-9, 4],
Rational[9, 4]}, {
Rational[-9, 4],
Rational[15, 4]}}, {{-2.25, 2.25}, {-2.25, 3.75}}], ImageSize -> {
UpTo[130], 57}], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {42.75, 57.}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"BouncingBalls1D\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -43.},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-53., -53.5}, {53., 37.5}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}; Null, WSM`Typeset`PackagePrivate`appearanceState$89335 === "Eval",
WSM`Typeset`PackagePrivate`p$89335 = {{
EdgeForm[
WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 1, 1],
Part[WSM`Typeset`PackagePrivate`expandedrange$89335, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$89335, 2, 2]}, RoundingRadius -> Offset[5]]},
InsetBox[
Evaluate[
ToBoxes[
ProgressIndicator[Appearance -> "Percolate"], StandardForm]]]}; Module[{WSM`Typeset`PackagePrivate`md$}, {WSM`Typeset`PackagePrivate`expandedsize$89335, WSM`Typeset`PackagePrivate`md$} = WSM`Typeset`PackagePrivate`getExpandedGraphic[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D", "5dc53b21-299a-48e9-b672-b1f8219ff30c"]; {WSM`Typeset`PackagePrivate`expandedprimitives$89335, WSM`Typeset`PackagePrivate`expandedopt$89335} = WSM`Typeset`PackagePrivate`separateGraphics[
WSM`Typeset`PackagePrivate`md$]; WSM`Typeset`PackagePrivate`expandedrange$89335 = Replace[PlotRange,
Flatten[WSM`Typeset`PackagePrivate`expandedopt$89335]]; WSM`Typeset`PackagePrivate`expandedeval$89335 = True; WSM`Typeset`PackagePrivate`expandedprimitives$89335 = Join[
WSM`Typeset`PackagePrivate`expandedprimitives$89335, {{ EdgeForm[WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 1, 1], Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 2,
1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 1,
2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$89335, 2, 2]}, RoundingRadius -> Offset[5]]},
With[{WSM`Typeset`PackagePrivate`leftmost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 1, 1], WSM`Typeset`PackagePrivate`bottommost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 2, 1]}, {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["BouncingBalls1D", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm],
Offset[{12, 12}, {WSM`Typeset`PackagePrivate`leftmost$, WSM`Typeset`PackagePrivate`bottommost$}], {-1, 0}]}]}]; Null]; WSM`Typeset`PackagePrivate`appearanceState$89335 = "Expanded"; Null, WSM`Typeset`PackagePrivate`appearanceState$89335 === "Expanded", WSM`Typeset`PackagePrivate`p$89335 = WSM`Typeset`PackagePrivate`expandedprimitives$89335; Null]; Null,
ImageSizeCache->{{0.5, 107.5}, {-48.5, 43.5}},
SynchronousUpdating->False,
TrackedSymbols:>{WSM`Typeset`PackagePrivate`appearanceState$89335}],
Initialization:>(
WSM`Typeset`PackagePrivate`expandedeval$89335 = Not[
WSM`Typeset`PackagePrivate`expandedeval$89335]; WSM`Typeset`PackagePrivate`expandedeval$89335 = Not[
WSM`Typeset`PackagePrivate`expandedeval$89335]; Null)],
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"],
WSM`ModelTag[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"]],
SelectWithContents -> True,
Editable -> False,
BoxID -> "5dc53b21-299a-48e9-b672-b1f8219ff30c",
ContentSelectable->False,
DefaultBaseStyle->{"Graphics", FrontEnd`GraphicsHighlightColor -> RGBColor[0, 0.46775, 1], ComponentwiseContextMenu -> {"GraphicsBox" -> {
MenuItem[
"Copy Model",
KernelExecute[
CopyToClipboard[
ReleaseHold[
MakeExpression[
MakeBoxes[
SystemModel[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"]], StandardForm]]]], MenuEvaluator -> Automatic],
MenuItem["Copy Model Name",
KernelExecute[
CopyToClipboard[(
"\"" <> "EducationExamples.Physics.BouncingBalls.BouncingBalls1D") <> "\""]], MenuEvaluator -> Automatic], Delimiter,
MenuItem["Simulate Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelSimulate", "[", "\"EducationExamples.Physics.BouncingBalls.BouncingBalls1D\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Preferred Plots in Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelPlot", "[", "\"EducationExamples.Physics.BouncingBalls.BouncingBalls1D\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Model Information",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModel", "[",
RowBox[{"\"EducationExamples.Physics.BouncingBalls.BouncingBalls1D\"",
",", "\"Summary\""}], "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]], Delimiter,
MenuItem["Open in System Modeler Model Center",
KernelExecute[
WSMLink`WSMModelCenter[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"]], MenuEvaluator -> Automatic],
MenuItem["Open in System Modeler Simulation Center",
KernelExecute[
WSMLink`WSMSimulationCenter[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"]], MenuEvaluator -> Automatic]}}},
ImageSize->{108., 93.},
PlotRange->{{-54., 54.}, {-54.5, 38.5}}]\), {"Plots"}, {"h"}]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/6ea7df3bdf62bba8.png) |
| Out[5]= | 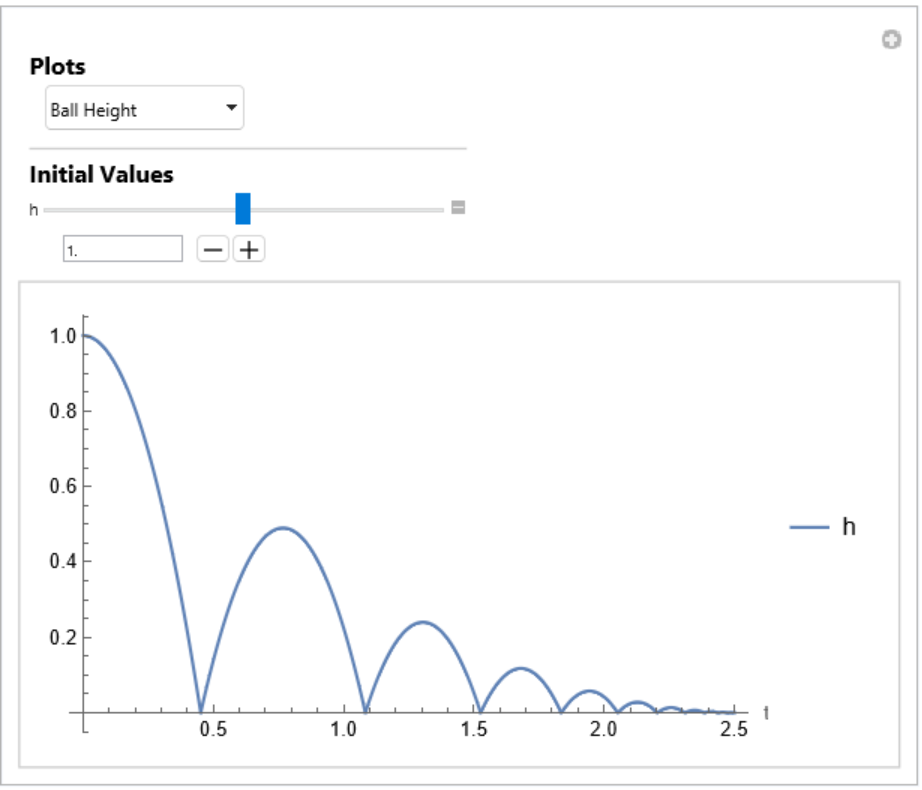 |
Select which plots to make available:
| In[6]:= | ![ResourceFunction["SystemModelManipulate"][\!\(\*
GraphicsBox[
TagBox[
TooltipBox[
DynamicModuleBox[{WSM`Typeset`PackagePrivate`p$89335 = {
InsetBox[
GraphicsBox[{{
RGBColor[0., 0.4666666666666667, 1.],
Thickness[
NCache[
Rational[1, 50], 0.02]],
LineBox[
NCache[{{
Rational[-7, 4], 0}, {0, 0}}, {{-1.75, 0}, {0, 0}}]],
LineBox[
NCache[{{
Rational[-7, 4],
Rational[7, 4]}, {
Rational[7, 4],
Rational[7, 4]}, {
Rational[7, 4],
Rational[-7, 4]}, {
Rational[-7, 4],
Rational[-7, 4]}, {
Rational[-7, 4],
Rational[7, 4]}}, {{-1.75, 1.75}, {1.75, 1.75}, {
1.75, -1.75}, {-1.75, -1.75}, {-1.75, 1.75}}]]}, { EdgeForm[None],
RGBColor[0., 0.4666666666666667, 1.],
DiskBox[
NCache[{
Rational[7, 4], 0}, {1.75, 0}],
NCache[
Rational[3, 8], 0.375]]}, {
EdgeForm[None],
GrayLevel[0.85],
RectangleBox[
NCache[{
Rational[-1, 2],
Rational[-1, 2]}, {-0.5, -0.5}],
NCache[{
Rational[1, 2],
Rational[1, 2]}, {0.5, 0.5}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[-1, 2]}, {-2.25, -0.5}],
NCache[{
Rational[-5, 4],
Rational[1, 2]}, {-1.25, 0.5}]],
RectangleBox[
NCache[{
Rational[-1, 2],
Rational[-9, 4]}, {-0.5, -2.25}],
NCache[{
Rational[1, 2],
Rational[-5, 4]}, {0.5, -1.25}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[-9, 4]}, {-2.25, -2.25}],
NCache[{
Rational[-5, 4],
Rational[-5, 4]}, {-1.25, -1.25}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[5, 4]}, {-2.25, 1.25}],
NCache[{
Rational[-5, 4],
Rational[9, 4]}, {-1.25, 2.25}]],
RectangleBox[
NCache[{
Rational[5, 4],
Rational[-9, 4]}, {1.25, -2.25}],
NCache[{
Rational[9, 4],
Rational[-5, 4]}, {2.25, -1.25}]],
TagBox[
PolygonBox[
NCache[{{
Rational[1, 2],
Rational[7, 4]}, {
Rational[-1, 2],
Rational[9, 4]}, {
Rational[-1, 2],
Rational[5, 4]}}, {{0.5, 1.75}, {-0.5, 2.25}, {-0.5, 1.25}}]], "Triangle"]}}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-9, 4],
Rational[9, 4]}, {
Rational[-9, 4],
Rational[15, 4]}}, {{-2.25, 2.25}, {-2.25, 3.75}}], ImageSize -> {
UpTo[130], 57}], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {42.75, 57.}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"BouncingBalls1D\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -43.},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-53., -53.5}, {53., 37.5}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}, WSM`Typeset`PackagePrivate`appearanceState$89335 = "Minimal", WSM`Typeset`PackagePrivate`expandedeval$89335 = False, WSM`Typeset`PackagePrivate`expandedprimitives$89335, WSM`Typeset`PackagePrivate`expandedopt$89335, WSM`Typeset`PackagePrivate`expandedsize$89335 = {108., 93.}, WSM`Typeset`PackagePrivate`expandedrange$89335 = {{-54., 54.}, {-54.5, 38.5}}},
DynamicWrapperBox[
DynamicBox[{WSM`Typeset`PackagePrivate`p$89335,
Which[
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$89335 === "Minimal"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquarePlusIconMedium"]], ButtonFunction :> (
If[WSM`Typeset`PackagePrivate`expandedeval$89335 === False, If[
TrueQ[WSMLink`Private`$WSMLinkIsLoaded], WSM`Typeset`PackagePrivate`appearanceState$89335 = "Eval"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"5dc53b21-299a-48e9-b672-b1f8219ff30c"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedsize$89335, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$89335}]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedrange$89335, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$89335}]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null, WSM`Typeset`PackagePrivate`appearanceState$89335 = "Expanded"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"5dc53b21-299a-48e9-b672-b1f8219ff30c"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = WSM`Typeset`PackagePrivate`expandedsize$89335; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = WSM`Typeset`PackagePrivate`expandedrange$89335; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{6, -6},
Scaled[{0, 1}]],
Scaled[{0, 1}]],
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$89335 === "Expanded"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquareMinusIconMedium"]], ButtonFunction :> (
WSM`Typeset`PackagePrivate`appearanceState$89335 = "Minimal"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"5dc53b21-299a-48e9-b672-b1f8219ff30c"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = {108., 93.}; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = {{-54., 54.}, {-54.5, 38.5}}; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{10, -10},
Scaled[{0, 1}]]], True, {}]},
ImageSizeCache->{{0.5, 107.5}, {-48.5, 43.5}},
TrackedSymbols:>{WSM`Typeset`PackagePrivate`p$89335}], Which[WSM`Typeset`PackagePrivate`appearanceState$89335 === "Minimal", WSM`Typeset`PackagePrivate`p$89335 = {
InsetBox[
GraphicsBox[{{
RGBColor[0., 0.4666666666666667, 1.],
Thickness[
NCache[
Rational[1, 50], 0.02]],
LineBox[
NCache[{{
Rational[-7, 4], 0}, {0, 0}}, {{-1.75, 0}, {0, 0}}]],
LineBox[
NCache[{{
Rational[-7, 4],
Rational[7, 4]}, {
Rational[7, 4],
Rational[7, 4]}, {
Rational[7, 4],
Rational[-7, 4]}, {
Rational[-7, 4],
Rational[-7, 4]}, {
Rational[-7, 4],
Rational[7, 4]}}, {{-1.75, 1.75}, {1.75, 1.75}, {
1.75, -1.75}, {-1.75, -1.75}, {-1.75, 1.75}}]]}, { EdgeForm[None],
RGBColor[0., 0.4666666666666667, 1.],
DiskBox[
NCache[{
Rational[7, 4], 0}, {1.75, 0}],
NCache[
Rational[3, 8], 0.375]]}, {
EdgeForm[None],
GrayLevel[0.85],
RectangleBox[
NCache[{
Rational[-1, 2],
Rational[-1, 2]}, {-0.5, -0.5}],
NCache[{
Rational[1, 2],
Rational[1, 2]}, {0.5, 0.5}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[-1, 2]}, {-2.25, -0.5}],
NCache[{
Rational[-5, 4],
Rational[1, 2]}, {-1.25, 0.5}]],
RectangleBox[
NCache[{
Rational[-1, 2],
Rational[-9, 4]}, {-0.5, -2.25}],
NCache[{
Rational[1, 2],
Rational[-5, 4]}, {0.5, -1.25}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[-9, 4]}, {-2.25, -2.25}],
NCache[{
Rational[-5, 4],
Rational[-5, 4]}, {-1.25, -1.25}]],
RectangleBox[
NCache[{
Rational[-9, 4],
Rational[5, 4]}, {-2.25, 1.25}],
NCache[{
Rational[-5, 4],
Rational[9, 4]}, {-1.25, 2.25}]],
RectangleBox[
NCache[{
Rational[5, 4],
Rational[-9, 4]}, {1.25, -2.25}],
NCache[{
Rational[9, 4],
Rational[-5, 4]}, {2.25, -1.25}]],
TagBox[
PolygonBox[
NCache[{{
Rational[1, 2],
Rational[7, 4]}, {
Rational[-1, 2],
Rational[9, 4]}, {
Rational[-1, 2],
Rational[5, 4]}}, {{0.5, 1.75}, {-0.5, 2.25}, {-0.5, 1.25}}]], "Triangle"]}}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-9, 4],
Rational[9, 4]}, {
Rational[-9, 4],
Rational[15, 4]}}, {{-2.25, 2.25}, {-2.25, 3.75}}], ImageSize -> {
UpTo[130], 57}], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {42.75, 57.}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"BouncingBalls1D\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -43.},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-53., -53.5}, {53., 37.5}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}; Null, WSM`Typeset`PackagePrivate`appearanceState$89335 === "Eval",
WSM`Typeset`PackagePrivate`p$89335 = {{
EdgeForm[
WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 1, 1],
Part[WSM`Typeset`PackagePrivate`expandedrange$89335, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$89335, 2, 2]}, RoundingRadius -> Offset[5]]},
InsetBox[
Evaluate[
ToBoxes[
ProgressIndicator[Appearance -> "Percolate"], StandardForm]]]}; Module[{WSM`Typeset`PackagePrivate`md$}, {WSM`Typeset`PackagePrivate`expandedsize$89335, WSM`Typeset`PackagePrivate`md$} = WSM`Typeset`PackagePrivate`getExpandedGraphic[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D", "5dc53b21-299a-48e9-b672-b1f8219ff30c"]; {WSM`Typeset`PackagePrivate`expandedprimitives$89335, WSM`Typeset`PackagePrivate`expandedopt$89335} = WSM`Typeset`PackagePrivate`separateGraphics[
WSM`Typeset`PackagePrivate`md$]; WSM`Typeset`PackagePrivate`expandedrange$89335 = Replace[PlotRange,
Flatten[WSM`Typeset`PackagePrivate`expandedopt$89335]]; WSM`Typeset`PackagePrivate`expandedeval$89335 = True; WSM`Typeset`PackagePrivate`expandedprimitives$89335 = Join[
WSM`Typeset`PackagePrivate`expandedprimitives$89335, {{ EdgeForm[WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 1, 1], Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 2,
1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 1,
2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$89335, 2, 2]}, RoundingRadius -> Offset[5]]},
With[{WSM`Typeset`PackagePrivate`leftmost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 1, 1], WSM`Typeset`PackagePrivate`bottommost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$89335, 2, 1]}, {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["BouncingBalls1D", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm],
Offset[{12, 12}, {WSM`Typeset`PackagePrivate`leftmost$, WSM`Typeset`PackagePrivate`bottommost$}], {-1, 0}]}]}]; Null]; WSM`Typeset`PackagePrivate`appearanceState$89335 = "Expanded"; Null, WSM`Typeset`PackagePrivate`appearanceState$89335 === "Expanded", WSM`Typeset`PackagePrivate`p$89335 = WSM`Typeset`PackagePrivate`expandedprimitives$89335; Null]; Null,
ImageSizeCache->{{0.5, 107.5}, {-48.5, 43.5}},
SynchronousUpdating->False,
TrackedSymbols:>{WSM`Typeset`PackagePrivate`appearanceState$89335}],
Initialization:>(
WSM`Typeset`PackagePrivate`expandedeval$89335 = Not[
WSM`Typeset`PackagePrivate`expandedeval$89335]; WSM`Typeset`PackagePrivate`expandedeval$89335 = Not[
WSM`Typeset`PackagePrivate`expandedeval$89335]; Null)],
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"],
WSM`ModelTag[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"]],
SelectWithContents -> True,
Editable -> False,
BoxID -> "5dc53b21-299a-48e9-b672-b1f8219ff30c",
ContentSelectable->False,
DefaultBaseStyle->{"Graphics", FrontEnd`GraphicsHighlightColor -> RGBColor[0, 0.46775, 1], ComponentwiseContextMenu -> {"GraphicsBox" -> {
MenuItem[
"Copy Model",
KernelExecute[
CopyToClipboard[
ReleaseHold[
MakeExpression[
MakeBoxes[
SystemModel[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"]], StandardForm]]]], MenuEvaluator -> Automatic],
MenuItem["Copy Model Name",
KernelExecute[
CopyToClipboard[(
"\"" <> "EducationExamples.Physics.BouncingBalls.BouncingBalls1D") <> "\""]], MenuEvaluator -> Automatic], Delimiter,
MenuItem["Simulate Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelSimulate", "[", "\"EducationExamples.Physics.BouncingBalls.BouncingBalls1D\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Preferred Plots in Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelPlot", "[", "\"EducationExamples.Physics.BouncingBalls.BouncingBalls1D\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Model Information",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModel", "[",
RowBox[{"\"EducationExamples.Physics.BouncingBalls.BouncingBalls1D\"",
",", "\"Summary\""}], "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]], Delimiter,
MenuItem["Open in System Modeler Model Center",
KernelExecute[
WSMLink`WSMModelCenter[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"]], MenuEvaluator -> Automatic],
MenuItem["Open in System Modeler Simulation Center",
KernelExecute[
WSMLink`WSMSimulationCenter[
"EducationExamples.Physics.BouncingBalls.BouncingBalls1D"]], MenuEvaluator -> Automatic]}}},
ImageSize->{108., 93.},
PlotRange->{{-54., 54.}, {-54.5, 38.5}}]\), {"Plots", {"Ball Velocity", "Number of Bounces"}}, {"h"}]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/2f5fbcc750a27d5c.png) |
| Out[6]= | 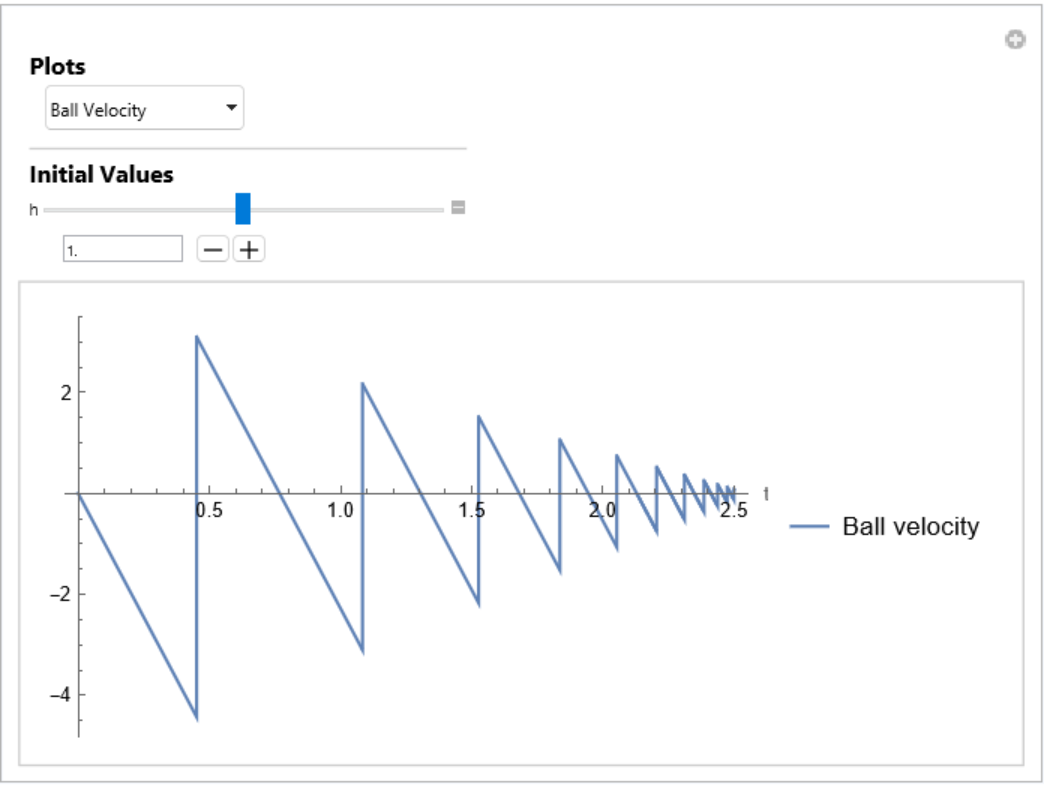 |
Pick minimum and maximum values for the control of a parameter value:
| In[7]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/a7ba9bd8-2c24-4ffa-b34c-58308409a376"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/4d45f2bde5eb847b.png) |
| Out[7]= | 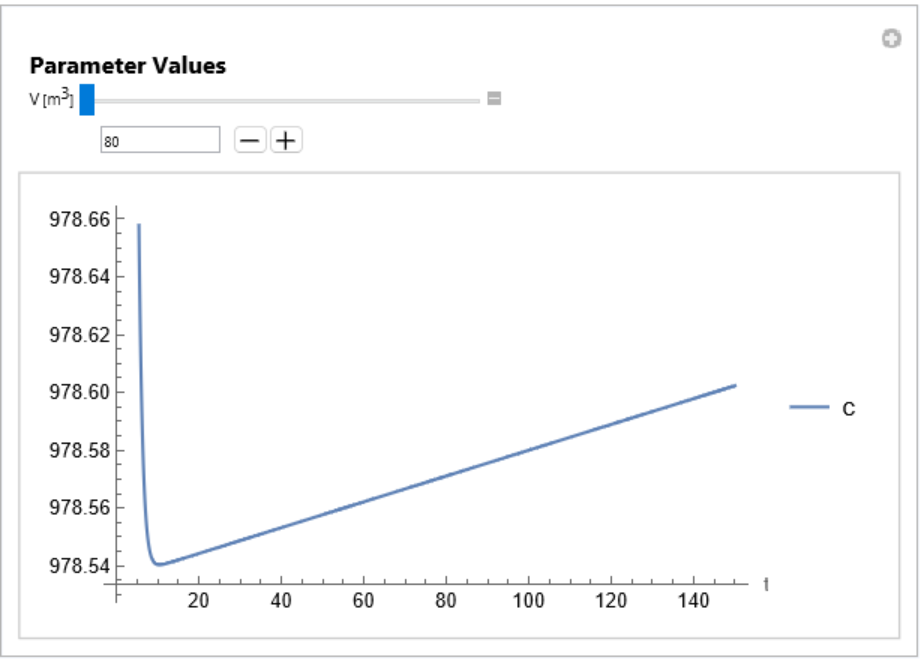 |
Pick minimum, maximum and jump values for the control of a parameter value:
| In[8]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/6fe56169-fe45-47dd-8022-0cace4a84b57"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/584eb7d95a2a5063.png) |
| Out[8]= | 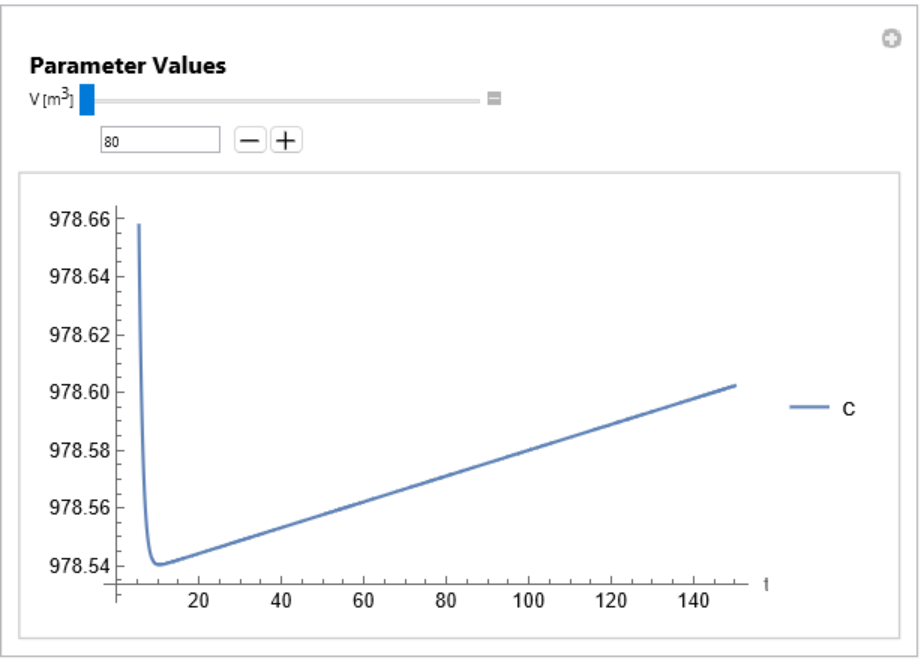 |
Pick an initial value for the control of a parameter value:
| In[9]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/e8907ce4-5898-4fe5-9b9f-96353bd130a8"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/494e23c68ffdf1c0.png) |
| Out[9]= | 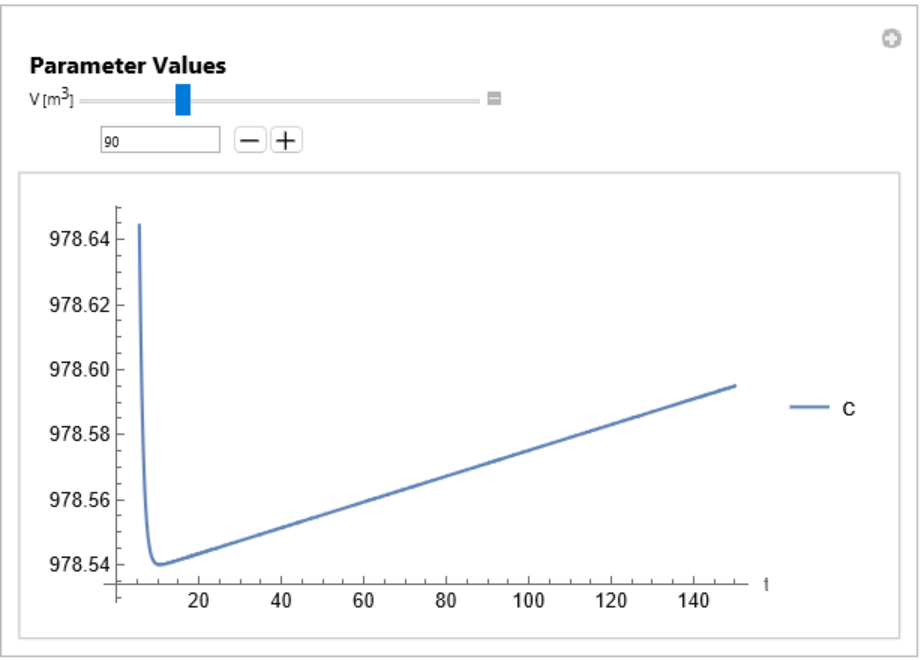 |
Pick a list of discrete values for the control of a parameter:
| In[10]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/90a8142c-c9bf-4743-8b56-6fb0935af490"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/21a35e9208b30d1d.png) |
| Out[10]= | 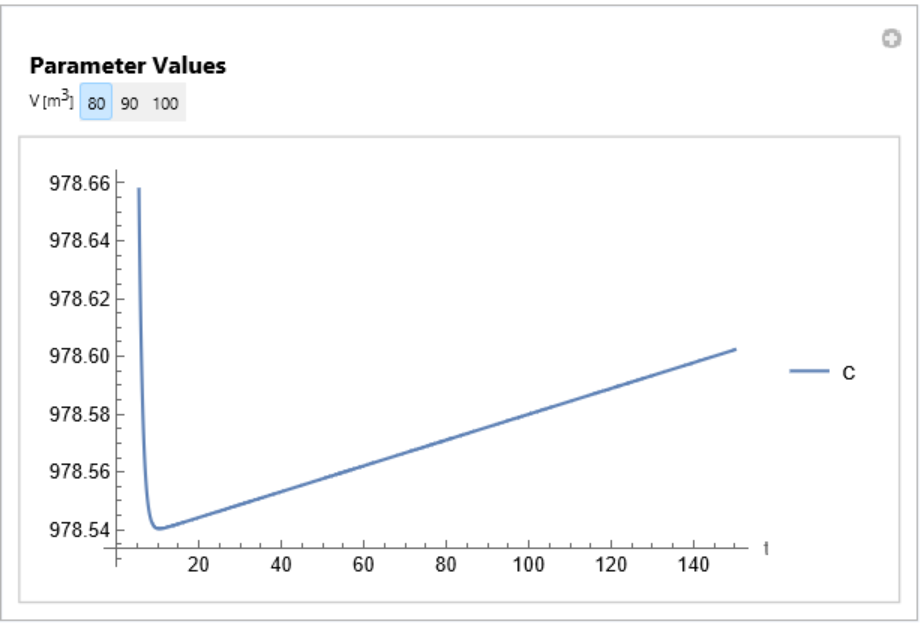 |
Pick a function for the control of a parameter:
| In[11]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/b7c43163-07ab-49da-af8d-21b1da335d4f"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/006887f08f0a1515.png) |
| Out[11]= | 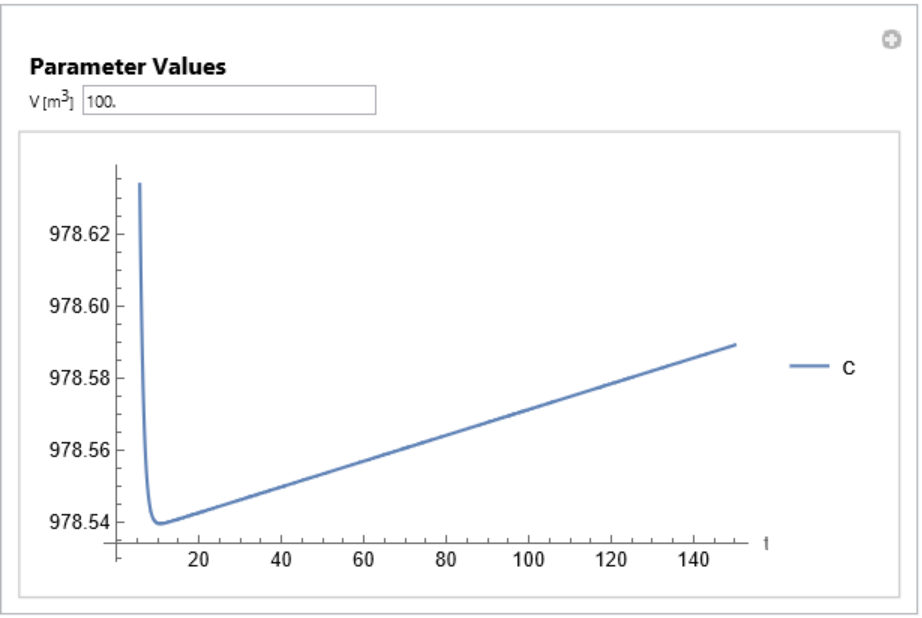 |
Pick a label for the control of a parameter value:
| In[12]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/00925835-4c55-4f2d-ab2f-ecbf73f12dd4"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/72a2049a102296fd.png) |
| Out[12]= | 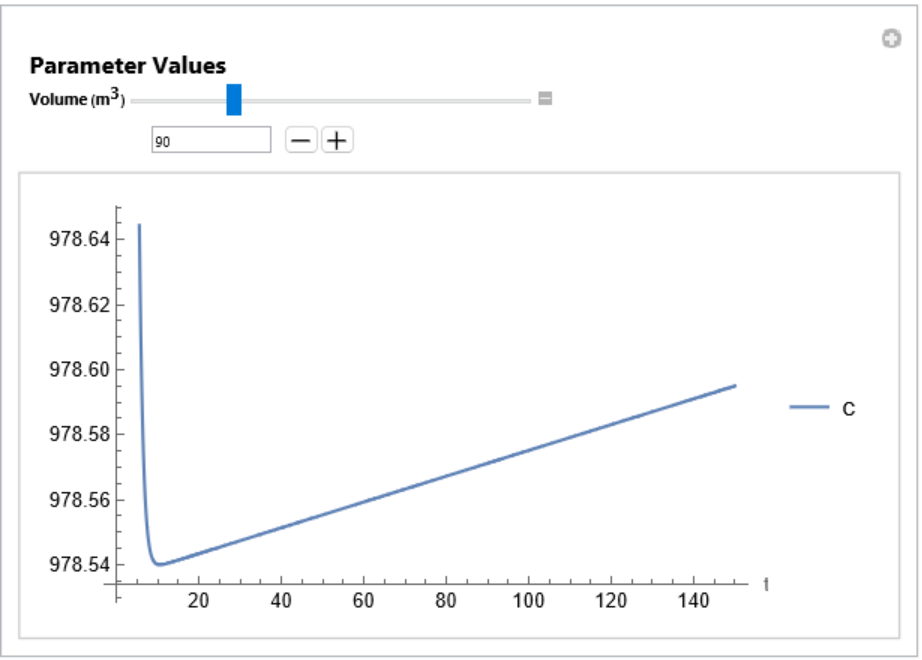 |
Pick a list of discrete values and their labels for the control of a parameter:
| In[13]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/771848da-4347-4631-80d3-c2fe011a0393"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/68750b2cd739c04d.png) |
| Out[13]= | 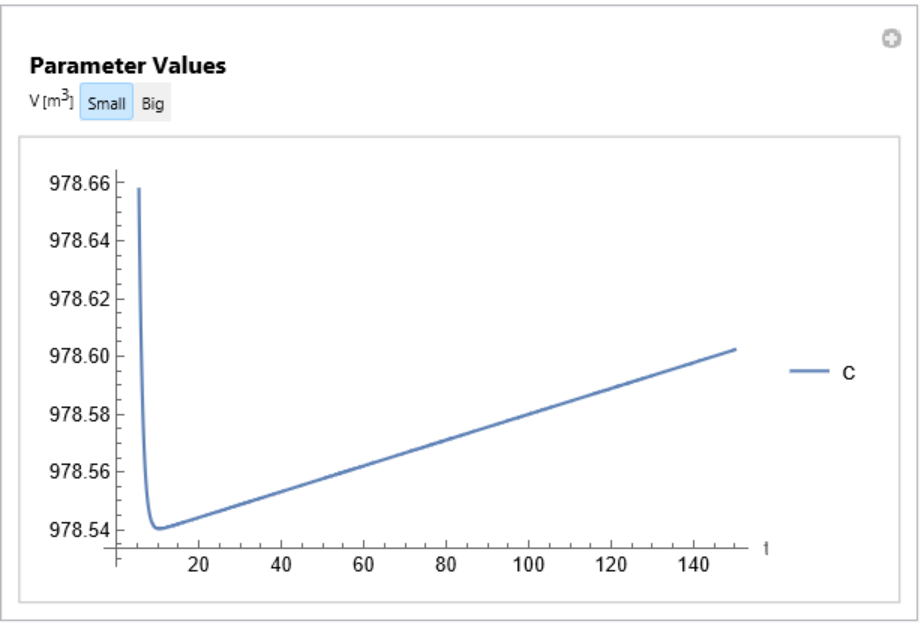 |
Controls for booleans and enumerations use PopupMenu as ControlType if they are not specified:
| In[14]:= | ![ResourceFunction["SystemModelManipulate"][\!\(\*
GraphicsBox[
TagBox[
TooltipBox[
DynamicModuleBox[{WSM`Typeset`PackagePrivate`p$310946 = {
InsetBox[
GraphicsBox[{
RGBColor[
0.25098039215686274`, 0.25098039215686274`, 0.25098039215686274`],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"x'\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"f(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["``````",
Style["x'", Italic, FontFamily -> "Times New Roman", FontSize -> 12], Style["=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["f(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[1, 10]}, {0, 0.1}]],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"0=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"g(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["````",
Style["0=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["g(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[-1, 10]}, {0, -0.1}]]}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-2, 5],
Rational[2, 5]}, {
Rational[-1, 5],
Rational[2, 5]}}, {{-0.4, 0.4}, {-0.2, 0.4}}], ImageSize -> NCache[{
UpTo[130],
Rational[171, 4]}, {
UpTo[130], 42.75}]], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {57., 42.75}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"Lissajous\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -35.875},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-37.5, -46.375}, {37.5, 30.375}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}, WSM`Typeset`PackagePrivate`appearanceState$310946 = "Minimal", WSM`Typeset`PackagePrivate`expandedeval$310946 = False, WSM`Typeset`PackagePrivate`expandedprimitives$310946, WSM`Typeset`PackagePrivate`expandedopt$310946, WSM`Typeset`PackagePrivate`expandedsize$310946 = {77., 78.75}, WSM`Typeset`PackagePrivate`expandedrange$310946 = {{-38.5, 38.5}, {-47.375, 31.375}}},
DynamicWrapperBox[
DynamicBox[{WSM`Typeset`PackagePrivate`p$310946,
Which[
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$310946 === "Minimal"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquarePlusIconMedium"]], ButtonFunction :> (
If[WSM`Typeset`PackagePrivate`expandedeval$310946 === False, If[
TrueQ[WSMLink`Private`$WSMLinkIsLoaded], WSM`Typeset`PackagePrivate`appearanceState$310946 = "Eval"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"7173edec-db7d-4e98-b119-64ef81c38c26"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedsize$310946, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$310946}]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedrange$310946, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$310946}]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null, WSM`Typeset`PackagePrivate`appearanceState$310946 = "Expanded"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"7173edec-db7d-4e98-b119-64ef81c38c26"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = WSM`Typeset`PackagePrivate`expandedsize$310946; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = WSM`Typeset`PackagePrivate`expandedrange$310946; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{6, -6},
Scaled[{0, 1}]],
Scaled[{0, 1}]],
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$310946 === "Expanded"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquareMinusIconMedium"]], ButtonFunction :> (
WSM`Typeset`PackagePrivate`appearanceState$310946 = "Minimal"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"7173edec-db7d-4e98-b119-64ef81c38c26"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = {77., 78.75}; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = {{-38.5, 38.5}, {-47.375, 31.375}}; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{10, -10},
Scaled[{0, 1}]]], True, {}]},
ImageSizeCache->{{0.5, 76.5}, {-41.25, 36.5}},
TrackedSymbols:>{WSM`Typeset`PackagePrivate`p$310946}], Which[WSM`Typeset`PackagePrivate`appearanceState$310946 === "Minimal", WSM`Typeset`PackagePrivate`p$310946 = {
InsetBox[
GraphicsBox[{
RGBColor[
0.25098039215686274`, 0.25098039215686274`, 0.25098039215686274`],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"x'\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"f(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["``````",
Style["x'", Italic, FontFamily -> "Times New Roman", FontSize -> 12], Style["=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["f(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[1, 10]}, {0, 0.1}]],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"0=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"g(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["````",
Style["0=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["g(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[-1, 10]}, {0, -0.1}]]}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-2, 5],
Rational[2, 5]}, {
Rational[-1, 5],
Rational[2, 5]}}, {{-0.4, 0.4}, {-0.2, 0.4}}], ImageSize -> NCache[{
UpTo[130],
Rational[171, 4]}, {
UpTo[130], 42.75}]], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {57., 42.75}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"Lissajous\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -35.875},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-37.5, -46.375}, {37.5, 30.375}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}; Null, WSM`Typeset`PackagePrivate`appearanceState$310946 === "Eval", WSM`Typeset`PackagePrivate`p$310946 = {{
EdgeForm[
WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$310946, 1, 1], Part[
WSM`Typeset`PackagePrivate`expandedrange$310946, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$310946, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$310946, 2, 2]}, RoundingRadius -> Offset[5]]},
InsetBox[
Evaluate[
ToBoxes[
ProgressIndicator[Appearance -> "Percolate"], StandardForm]]]}; Module[{WSM`Typeset`PackagePrivate`md$}, {WSM`Typeset`PackagePrivate`expandedsize$310946, WSM`Typeset`PackagePrivate`md$} = WSM`Typeset`PackagePrivate`getExpandedGraphic[
"DocumentationExamples.Simulation.Lissajous", "7173edec-db7d-4e98-b119-64ef81c38c26"]; {WSM`Typeset`PackagePrivate`expandedprimitives$310946, WSM`Typeset`PackagePrivate`expandedopt$310946} = WSM`Typeset`PackagePrivate`separateGraphics[
WSM`Typeset`PackagePrivate`md$]; WSM`Typeset`PackagePrivate`expandedrange$310946 = Replace[PlotRange,
Flatten[WSM`Typeset`PackagePrivate`expandedopt$310946]]; WSM`Typeset`PackagePrivate`expandedeval$310946 = True; WSM`Typeset`PackagePrivate`expandedprimitives$310946 = Join[
WSM`Typeset`PackagePrivate`expandedprimitives$310946, {{ EdgeForm[WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$310946, 1,
1], Part[
WSM`Typeset`PackagePrivate`expandedrange$310946, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$310946, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$310946, 2, 2]}, RoundingRadius -> Offset[5]]},
With[{WSM`Typeset`PackagePrivate`leftmost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$310946, 1,
1], WSM`Typeset`PackagePrivate`bottommost$ = Part[WSM`Typeset`PackagePrivate`expandedrange$310946, 2, 1]}, { RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["Lissajous", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm],
Offset[{12, 12}, {WSM`Typeset`PackagePrivate`leftmost$, WSM`Typeset`PackagePrivate`bottommost$}], {-1, 0}]}]}]; Null]; WSM`Typeset`PackagePrivate`appearanceState$310946 = "Expanded"; Null, WSM`Typeset`PackagePrivate`appearanceState$310946 === "Expanded", WSM`Typeset`PackagePrivate`p$310946 = WSM`Typeset`PackagePrivate`expandedprimitives$310946; Null]; Null,
ImageSizeCache->{{0.5, 76.5}, {-41.25, 36.5}},
SynchronousUpdating->False,
TrackedSymbols:>{WSM`Typeset`PackagePrivate`appearanceState$310946}],
Initialization:>(
WSM`Typeset`PackagePrivate`expandedeval$310946 = Not[
WSM`Typeset`PackagePrivate`expandedeval$310946]; WSM`Typeset`PackagePrivate`expandedeval$310946 = Not[
WSM`Typeset`PackagePrivate`expandedeval$310946]; Null)],
"DocumentationExamples.Simulation.Lissajous"],
WSM`ModelTag["DocumentationExamples.Simulation.Lissajous"]],
SelectWithContents -> True,
Editable -> False,
BoxID -> "7173edec-db7d-4e98-b119-64ef81c38c26",
ContentSelectable->False,
DefaultBaseStyle->{"Graphics", FrontEnd`GraphicsHighlightColor -> RGBColor[0, 0.46775, 1], ComponentwiseContextMenu -> {"GraphicsBox" -> {
MenuItem[
"Copy Model",
KernelExecute[
CopyToClipboard[
ReleaseHold[
MakeExpression[
MakeBoxes[
SystemModel["DocumentationExamples.Simulation.Lissajous"]], StandardForm]]]], MenuEvaluator -> Automatic],
MenuItem["Copy Model Name",
KernelExecute[
CopyToClipboard[(
"\"" <> "DocumentationExamples.Simulation.Lissajous") <> "\""]], MenuEvaluator -> Automatic], Delimiter,
MenuItem["Simulate Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelSimulate", "[", "\"DocumentationExamples.Simulation.Lissajous\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Preferred Plots in Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelPlot", "[", "\"DocumentationExamples.Simulation.Lissajous\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Model Information",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModel", "[",
RowBox[{"\"DocumentationExamples.Simulation.Lissajous\"", ",", "\"Summary\""}], "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]], Delimiter,
MenuItem["Open in System Modeler Model Center",
KernelExecute[
WSMLink`WSMModelCenter["DocumentationExamples.Simulation.Lissajous"]],
MenuEvaluator -> Automatic],
MenuItem["Open in System Modeler Simulation Center",
KernelExecute[
WSMLink`WSMSimulationCenter[
"DocumentationExamples.Simulation.Lissajous"]], MenuEvaluator -> Automatic]}}},
ImageSize->{77., 78.75},
PlotRange->{{-38.5, 38.5}, {-47.375, 31.375}}]\), {"fRatio"}, {"coupled"}]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/0211aea37dee45b6.png) |
| Out[14]= | 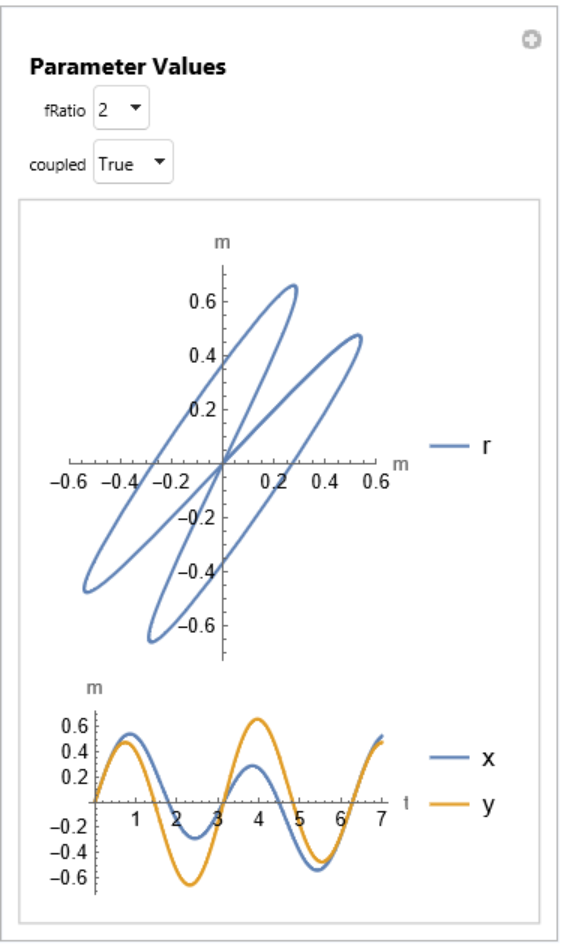 |
If provided in the model, the base unit is displayed next to the name of the variable or parameter and the description is shown with Tooltip:
| In[15]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/1df9b2f9-d66a-4662-8dfb-18a51e7a4417"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/4eae5516917c79b8.png) |
| Out[15]= | 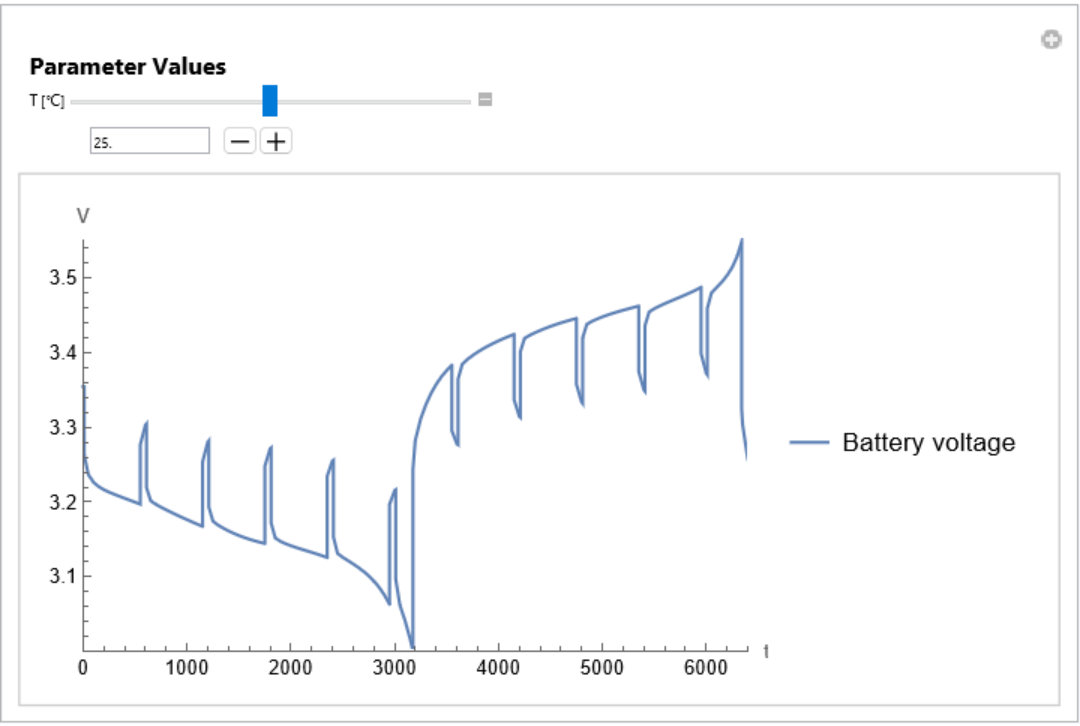 |
Real and integer values are displayed by default:
| In[16]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/8f9195f4-40ff-4724-9b40-c0ffbafb9015"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/09f93abb66e68095.png) |
| Out[16]= | 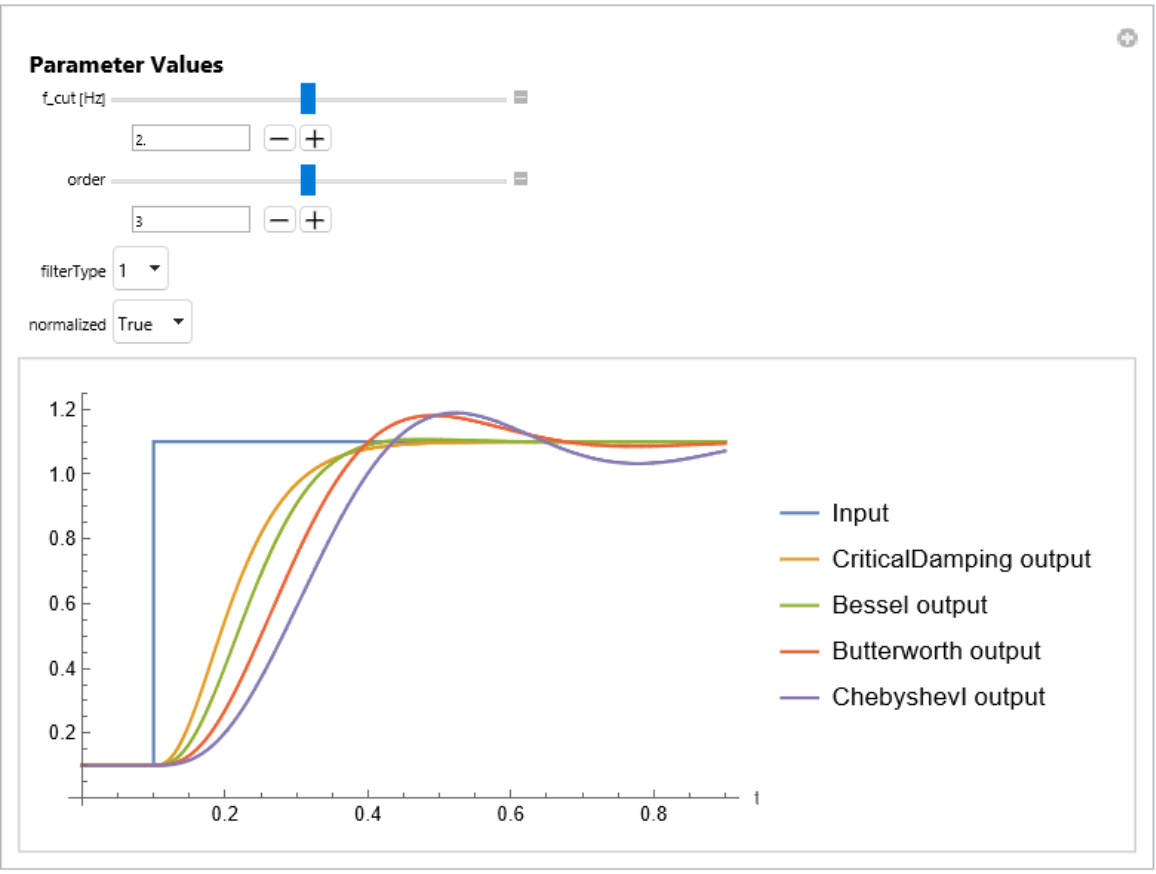 |
Remove displayed values:
| In[17]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/bf148543-56ba-4d4c-883e-f3ad050ed53c"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/60125227405609fc.png) |
| Out[17]= | 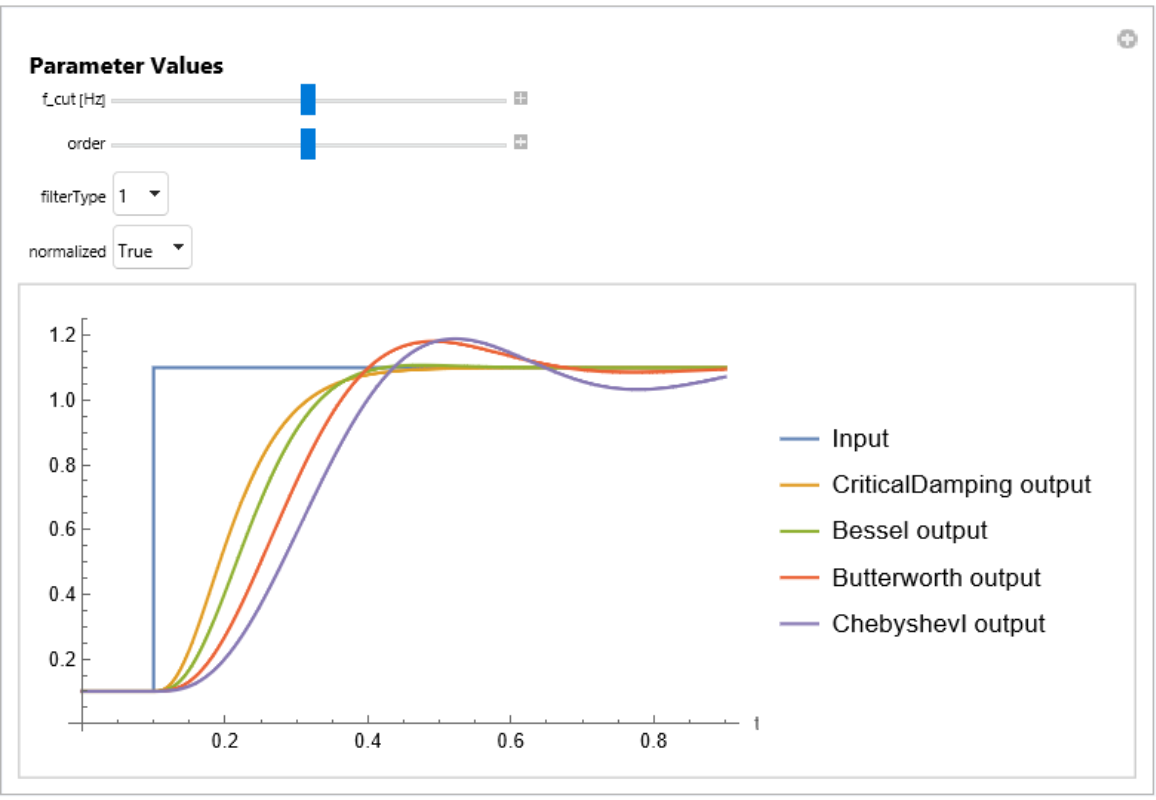 |
Study the trajectory of a classical charged particle under the effect of the Lorentz force:
| In[18]:= | ![ResourceFunction["SystemModelManipulate"][\!\(\*
GraphicsBox[
TagBox[
TooltipBox[
DynamicModuleBox[{WSM`Typeset`PackagePrivate`p$463055 = {
InsetBox[
GraphicsBox[{
RGBColor[
0.25098039215686274`, 0.25098039215686274`, 0.25098039215686274`],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"x'\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"f(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["``````",
Style["x'", Italic, FontFamily -> "Times New Roman", FontSize -> 12], Style["=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["f(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[1, 10]}, {0, 0.1}]],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"0=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"g(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["````",
Style["0=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["g(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[-1, 10]}, {0, -0.1}]]}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-2, 5],
Rational[2, 5]}, {
Rational[-1, 5],
Rational[2, 5]}}, {{-0.4, 0.4}, {-0.2, 0.4}}], ImageSize -> NCache[{
UpTo[130],
Rational[171, 4]}, {
UpTo[130], 42.75}]], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {57., 42.75}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"LorentzForce\"", FontSize -> 9, FontFamily -> "Helvetica",
StripOnInput -> False], TraditionalForm], {0, -35.875},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-42., -46.375}, {42., 30.375}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}, WSM`Typeset`PackagePrivate`appearanceState$463055 = "Minimal", WSM`Typeset`PackagePrivate`expandedeval$463055 = False, WSM`Typeset`PackagePrivate`expandedprimitives$463055, WSM`Typeset`PackagePrivate`expandedopt$463055, WSM`Typeset`PackagePrivate`expandedsize$463055 = {86., 78.75}, WSM`Typeset`PackagePrivate`expandedrange$463055 = {{-43., 43.}, {-47.375, 31.375}}},
DynamicWrapperBox[
DynamicBox[{WSM`Typeset`PackagePrivate`p$463055,
Which[
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$463055 === "Minimal"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquarePlusIconMedium"]], ButtonFunction :> (
If[WSM`Typeset`PackagePrivate`expandedeval$463055 === False, If[
TrueQ[WSMLink`Private`$WSMLinkIsLoaded], WSM`Typeset`PackagePrivate`appearanceState$463055 = "Eval"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"e323bc36-a002-4637-a02c-9468ab477ee1"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedsize$463055, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$463055}]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedrange$463055, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$463055}]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null, WSM`Typeset`PackagePrivate`appearanceState$463055 = "Expanded"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"e323bc36-a002-4637-a02c-9468ab477ee1"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = WSM`Typeset`PackagePrivate`expandedsize$463055; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = WSM`Typeset`PackagePrivate`expandedrange$463055; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{6, -6},
Scaled[{0, 1}]],
Scaled[{0, 1}]],
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$463055 === "Expanded"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquareMinusIconMedium"]], ButtonFunction :> (
WSM`Typeset`PackagePrivate`appearanceState$463055 = "Minimal"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"e323bc36-a002-4637-a02c-9468ab477ee1"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = {86., 78.75}; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = {{-43., 43.}, {-47.375, 31.375}}; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{10, -10},
Scaled[{0, 1}]]], True, {}]},
ImageSizeCache->{{0.5, 85.5}, {-41.25, 36.5}},
TrackedSymbols:>{WSM`Typeset`PackagePrivate`p$463055}], Which[WSM`Typeset`PackagePrivate`appearanceState$463055 === "Minimal", WSM`Typeset`PackagePrivate`p$463055 = {
InsetBox[
GraphicsBox[{
RGBColor[
0.25098039215686274`, 0.25098039215686274`, 0.25098039215686274`],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"x'\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"f(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["``````",
Style["x'", Italic, FontFamily -> "Times New Roman", FontSize -> 12], Style["=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["f(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[1, 10]}, {0, 0.1}]],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"0=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"g(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["````",
Style["0=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["g(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[-1, 10]}, {0, -0.1}]]}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-2, 5],
Rational[2, 5]}, {
Rational[-1, 5],
Rational[2, 5]}}, {{-0.4, 0.4}, {-0.2, 0.4}}], ImageSize -> NCache[{
UpTo[130],
Rational[171, 4]}, {
UpTo[130], 42.75}]], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {57., 42.75}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"LorentzForce\"", FontSize -> 9, FontFamily -> "Helvetica",
StripOnInput -> False], TraditionalForm], {0, -35.875},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-42., -46.375}, {42., 30.375}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}; Null, WSM`Typeset`PackagePrivate`appearanceState$463055 === "Eval", WSM`Typeset`PackagePrivate`p$463055 = {{
EdgeForm[
WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$463055, 1, 1], Part[
WSM`Typeset`PackagePrivate`expandedrange$463055, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$463055, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$463055, 2, 2]}, RoundingRadius -> Offset[5]]},
InsetBox[
Evaluate[
ToBoxes[
ProgressIndicator[Appearance -> "Percolate"], StandardForm]]]}; Module[{WSM`Typeset`PackagePrivate`md$}, {WSM`Typeset`PackagePrivate`expandedsize$463055, WSM`Typeset`PackagePrivate`md$} = WSM`Typeset`PackagePrivate`getExpandedGraphic[
"DocumentationExamples.Simulation.LorentzForce", "e323bc36-a002-4637-a02c-9468ab477ee1"]; {WSM`Typeset`PackagePrivate`expandedprimitives$463055, WSM`Typeset`PackagePrivate`expandedopt$463055} = WSM`Typeset`PackagePrivate`separateGraphics[
WSM`Typeset`PackagePrivate`md$]; WSM`Typeset`PackagePrivate`expandedrange$463055 = Replace[PlotRange,
Flatten[WSM`Typeset`PackagePrivate`expandedopt$463055]]; WSM`Typeset`PackagePrivate`expandedeval$463055 = True; WSM`Typeset`PackagePrivate`expandedprimitives$463055 = Join[
WSM`Typeset`PackagePrivate`expandedprimitives$463055, {{ EdgeForm[WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$463055, 1,
1], Part[
WSM`Typeset`PackagePrivate`expandedrange$463055, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$463055, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$463055, 2, 2]}, RoundingRadius -> Offset[5]]},
With[{WSM`Typeset`PackagePrivate`leftmost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$463055, 1,
1], WSM`Typeset`PackagePrivate`bottommost$ = Part[WSM`Typeset`PackagePrivate`expandedrange$463055, 2, 1]}, { RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["LorentzForce", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm],
Offset[{12, 12}, {WSM`Typeset`PackagePrivate`leftmost$, WSM`Typeset`PackagePrivate`bottommost$}], {-1, 0}]}]}]; Null]; WSM`Typeset`PackagePrivate`appearanceState$463055 = "Expanded"; Null, WSM`Typeset`PackagePrivate`appearanceState$463055 === "Expanded", WSM`Typeset`PackagePrivate`p$463055 = WSM`Typeset`PackagePrivate`expandedprimitives$463055; Null]; Null,
ImageSizeCache->{{0.5, 85.5}, {-41.25, 36.5}},
SynchronousUpdating->False,
TrackedSymbols:>{WSM`Typeset`PackagePrivate`appearanceState$463055}],
Initialization:>(
WSM`Typeset`PackagePrivate`expandedeval$463055 = Not[
WSM`Typeset`PackagePrivate`expandedeval$463055]; WSM`Typeset`PackagePrivate`expandedeval$463055 = Not[
WSM`Typeset`PackagePrivate`expandedeval$463055]; Null)],
"DocumentationExamples.Simulation.LorentzForce"],
WSM`ModelTag["DocumentationExamples.Simulation.LorentzForce"]],
SelectWithContents -> True,
Editable -> False,
BoxID -> "e323bc36-a002-4637-a02c-9468ab477ee1",
ContentSelectable->False,
DefaultBaseStyle->{"Graphics", FrontEnd`GraphicsHighlightColor -> RGBColor[0, 0.46775, 1], ComponentwiseContextMenu -> {"GraphicsBox" -> {
MenuItem[
"Copy Model",
KernelExecute[
CopyToClipboard[
ReleaseHold[
MakeExpression[
MakeBoxes[
SystemModel["DocumentationExamples.Simulation.LorentzForce"]], StandardForm]]]], MenuEvaluator -> Automatic],
MenuItem["Copy Model Name",
KernelExecute[
CopyToClipboard[(
"\"" <> "DocumentationExamples.Simulation.LorentzForce") <> "\""]], MenuEvaluator -> Automatic], Delimiter,
MenuItem["Simulate Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelSimulate", "[", "\"DocumentationExamples.Simulation.LorentzForce\"",
"]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Preferred Plots in Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelPlot", "[", "\"DocumentationExamples.Simulation.LorentzForce\"",
"]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Model Information",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModel", "[",
RowBox[{"\"DocumentationExamples.Simulation.LorentzForce\"", ",", "\"Summary\""}], "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]], Delimiter,
MenuItem["Open in System Modeler Model Center",
KernelExecute[
WSMLink`WSMModelCenter[
"DocumentationExamples.Simulation.LorentzForce"]], MenuEvaluator -> Automatic],
MenuItem["Open in System Modeler Simulation Center",
KernelExecute[
WSMLink`WSMSimulationCenter[
"DocumentationExamples.Simulation.LorentzForce"]], MenuEvaluator -> Automatic]}}},
ImageSize->{86., 78.75},
PlotRange->{{-43., 43.}, {-47.375, 31.375}}]\), {"Plots"}, {"Bz"}, {"E0"}, {"q"}, PlotRange -> All, Frame -> True, Axes -> False]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/6fb461d325b56801.png) |
| Out[18]= | 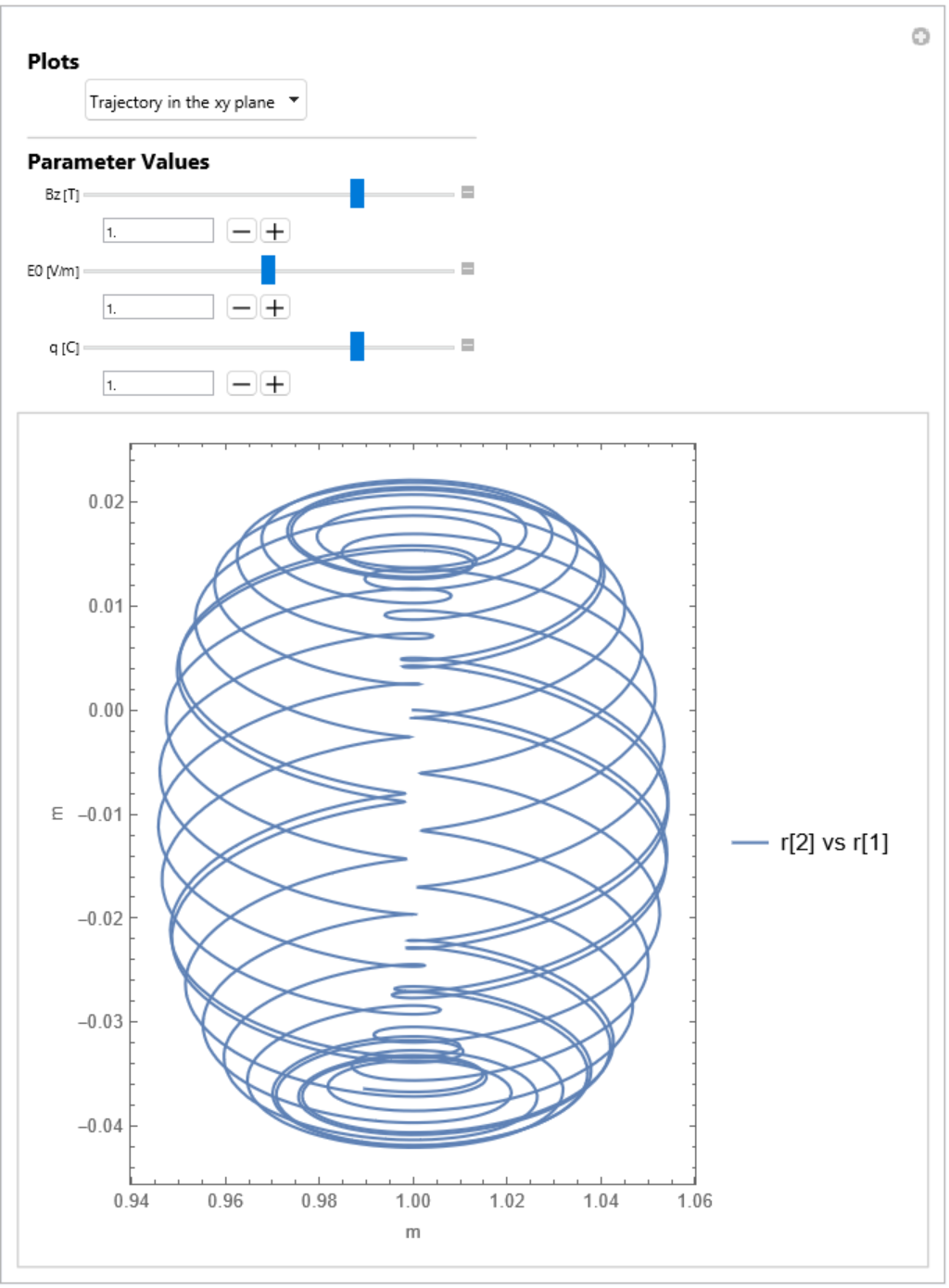 |
Visualize trajectories in the configuration space of a Duffing oscillator:
| In[19]:= | ![ResourceFunction["SystemModelManipulate"][\!\(\*
GraphicsBox[
TagBox[
TooltipBox[
DynamicModuleBox[{WSM`Typeset`PackagePrivate`p$525892 = {
InsetBox[
GraphicsBox[{
RGBColor[
0.25098039215686274`, 0.25098039215686274`, 0.25098039215686274`],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"x'\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"f(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["``````",
Style["x'", Italic, FontFamily -> "Times New Roman", FontSize -> 12], Style["=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["f(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[1, 10]}, {0, 0.1}]],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"0=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"g(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["````",
Style["0=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["g(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[-1, 10]}, {0, -0.1}]]}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-2, 5],
Rational[2, 5]}, {
Rational[-1, 5],
Rational[2, 5]}}, {{-0.4, 0.4}, {-0.2, 0.4}}], ImageSize -> NCache[{
UpTo[130],
Rational[171, 4]}, {
UpTo[130], 42.75}]], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {57., 42.75}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"DuffingOscillator\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -35.875},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-60., -46.375}, {60., 30.375}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}, WSM`Typeset`PackagePrivate`appearanceState$525892 = "Minimal", WSM`Typeset`PackagePrivate`expandedeval$525892 = False, WSM`Typeset`PackagePrivate`expandedprimitives$525892, WSM`Typeset`PackagePrivate`expandedopt$525892, WSM`Typeset`PackagePrivate`expandedsize$525892 = {122., 78.75},
WSM`Typeset`PackagePrivate`expandedrange$525892 = {{-61., 61.}, {-47.375, 31.375}}},
DynamicWrapperBox[
DynamicBox[{WSM`Typeset`PackagePrivate`p$525892,
Which[
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$525892 === "Minimal"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquarePlusIconMedium"]], ButtonFunction :> (
If[WSM`Typeset`PackagePrivate`expandedeval$525892 === False, If[
TrueQ[WSMLink`Private`$WSMLinkIsLoaded], WSM`Typeset`PackagePrivate`appearanceState$525892 = "Eval"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"4bd178b9-c7b1-4616-b89d-7d22d192325e"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedsize$525892, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$525892}]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedrange$525892, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$525892}]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null, WSM`Typeset`PackagePrivate`appearanceState$525892 = "Expanded"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"4bd178b9-c7b1-4616-b89d-7d22d192325e"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = WSM`Typeset`PackagePrivate`expandedsize$525892; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = WSM`Typeset`PackagePrivate`expandedrange$525892; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{6, -6},
Scaled[{0, 1}]],
Scaled[{0, 1}]],
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$525892 === "Expanded"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquareMinusIconMedium"]], ButtonFunction :> (
WSM`Typeset`PackagePrivate`appearanceState$525892 = "Minimal"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"4bd178b9-c7b1-4616-b89d-7d22d192325e"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = {122., 78.75}; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = {{-61., 61.}, {-47.375, 31.375}}; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{10, -10},
Scaled[{0, 1}]]], True, {}]},
ImageSizeCache->{{0.5, 121.5}, {-41.25, 36.5}},
TrackedSymbols:>{WSM`Typeset`PackagePrivate`p$525892}], Which[WSM`Typeset`PackagePrivate`appearanceState$525892 === "Minimal", WSM`Typeset`PackagePrivate`p$525892 = {
InsetBox[
GraphicsBox[{
RGBColor[
0.25098039215686274`, 0.25098039215686274`, 0.25098039215686274`],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"x'\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"f(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["``````",
Style["x'", Italic, FontFamily -> "Times New Roman", FontSize -> 12], Style["=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["f(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[1, 10]}, {0, 0.1}]],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"0=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"g(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["````",
Style["0=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["g(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[-1, 10]}, {0, -0.1}]]}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-2, 5],
Rational[2, 5]}, {
Rational[-1, 5],
Rational[2, 5]}}, {{-0.4, 0.4}, {-0.2, 0.4}}], ImageSize -> NCache[{
UpTo[130],
Rational[171, 4]}, {
UpTo[130], 42.75}]], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {57., 42.75}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"DuffingOscillator\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -35.875},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-60., -46.375}, {60., 30.375}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}; Null, WSM`Typeset`PackagePrivate`appearanceState$525892 === "Eval", WSM`Typeset`PackagePrivate`p$525892 = {{
EdgeForm[
WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$525892, 1, 1], Part[
WSM`Typeset`PackagePrivate`expandedrange$525892, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$525892, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$525892, 2, 2]}, RoundingRadius -> Offset[5]]},
InsetBox[
Evaluate[
ToBoxes[
ProgressIndicator[Appearance -> "Percolate"], StandardForm]]]}; Module[{WSM`Typeset`PackagePrivate`md$}, {WSM`Typeset`PackagePrivate`expandedsize$525892, WSM`Typeset`PackagePrivate`md$} = WSM`Typeset`PackagePrivate`getExpandedGraphic[
"DocumentationExamples.Simulation.DuffingOscillator", "4bd178b9-c7b1-4616-b89d-7d22d192325e"]; {WSM`Typeset`PackagePrivate`expandedprimitives$525892, WSM`Typeset`PackagePrivate`expandedopt$525892} = WSM`Typeset`PackagePrivate`separateGraphics[
WSM`Typeset`PackagePrivate`md$]; WSM`Typeset`PackagePrivate`expandedrange$525892 = Replace[PlotRange,
Flatten[WSM`Typeset`PackagePrivate`expandedopt$525892]]; WSM`Typeset`PackagePrivate`expandedeval$525892 = True; WSM`Typeset`PackagePrivate`expandedprimitives$525892 = Join[
WSM`Typeset`PackagePrivate`expandedprimitives$525892, {{ EdgeForm[WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$525892, 1,
1], Part[
WSM`Typeset`PackagePrivate`expandedrange$525892, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$525892, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$525892, 2, 2]}, RoundingRadius -> Offset[5]]},
With[{WSM`Typeset`PackagePrivate`leftmost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$525892, 1,
1], WSM`Typeset`PackagePrivate`bottommost$ = Part[WSM`Typeset`PackagePrivate`expandedrange$525892, 2, 1]}, { RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["DuffingOscillator", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False],
TraditionalForm],
Offset[{12, 12}, {WSM`Typeset`PackagePrivate`leftmost$, WSM`Typeset`PackagePrivate`bottommost$}], {-1, 0}]}]}]; Null]; WSM`Typeset`PackagePrivate`appearanceState$525892 = "Expanded"; Null, WSM`Typeset`PackagePrivate`appearanceState$525892 === "Expanded", WSM`Typeset`PackagePrivate`p$525892 = WSM`Typeset`PackagePrivate`expandedprimitives$525892; Null]; Null,
ImageSizeCache->{{0.5, 121.5}, {-41.25, 36.5}},
SynchronousUpdating->False,
TrackedSymbols:>{WSM`Typeset`PackagePrivate`appearanceState$525892}],
Initialization:>(
WSM`Typeset`PackagePrivate`expandedeval$525892 = Not[
WSM`Typeset`PackagePrivate`expandedeval$525892]; WSM`Typeset`PackagePrivate`expandedeval$525892 = Not[
WSM`Typeset`PackagePrivate`expandedeval$525892]; Null)],
"DocumentationExamples.Simulation.DuffingOscillator"],
WSM`ModelTag["DocumentationExamples.Simulation.DuffingOscillator"]],
SelectWithContents -> True,
Editable -> False,
BoxID -> "4bd178b9-c7b1-4616-b89d-7d22d192325e",
ContentSelectable->False,
DefaultBaseStyle->{"Graphics", FrontEnd`GraphicsHighlightColor -> RGBColor[0, 0.46775, 1], ComponentwiseContextMenu -> {"GraphicsBox" -> {
MenuItem[
"Copy Model",
KernelExecute[
CopyToClipboard[
ReleaseHold[
MakeExpression[
MakeBoxes[
SystemModel["DocumentationExamples.Simulation.DuffingOscillator"]], StandardForm]]]], MenuEvaluator -> Automatic],
MenuItem["Copy Model Name",
KernelExecute[
CopyToClipboard[(
"\"" <> "DocumentationExamples.Simulation.DuffingOscillator") <> "\""]], MenuEvaluator -> Automatic], Delimiter,
MenuItem["Simulate Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelSimulate", "[", "\"DocumentationExamples.Simulation.DuffingOscillator\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Preferred Plots in Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelPlot", "[", "\"DocumentationExamples.Simulation.DuffingOscillator\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Model Information",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModel", "[",
RowBox[{"\"DocumentationExamples.Simulation.DuffingOscillator\"", ",",
"\"Summary\""}], "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]], Delimiter,
MenuItem["Open in System Modeler Model Center",
KernelExecute[
WSMLink`WSMModelCenter[
"DocumentationExamples.Simulation.DuffingOscillator"]], MenuEvaluator -> Automatic],
MenuItem["Open in System Modeler Simulation Center",
KernelExecute[
WSMLink`WSMSimulationCenter[
"DocumentationExamples.Simulation.DuffingOscillator"]], MenuEvaluator -> Automatic]}}},
ImageSize->{122., 78.75},
PlotRange->{{-61., 61.}, {-47.375, 31.375}}]\), {"gamma"}]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/288b2e637deb7d97.png) |
| Out[19]= | 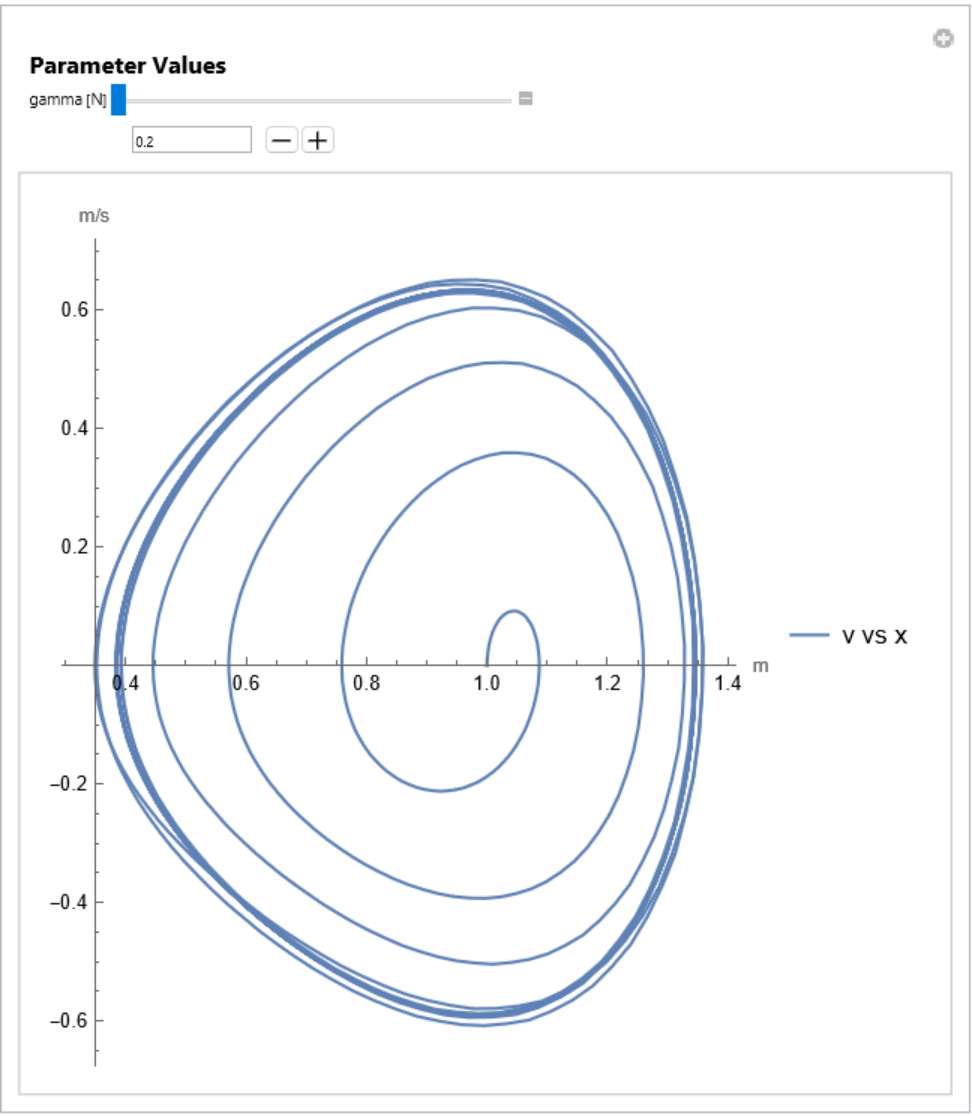 |
Visualize trajectories and mass loss of a rocket with exhaust velocity of constant magnitude:
| In[20]:= | ![ResourceFunction["SystemModelManipulate"][\!\(\*
GraphicsBox[
TagBox[
TooltipBox[
DynamicModuleBox[{WSM`Typeset`PackagePrivate`p$527668 = {
InsetBox[
GraphicsBox[{
RGBColor[
0.25098039215686274`, 0.25098039215686274`, 0.25098039215686274`],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"x'\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"f(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["``````",
Style["x'", Italic, FontFamily -> "Times New Roman", FontSize -> 12], Style["=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["f(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[1, 10]}, {0, 0.1}]],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"0=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"g(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["````",
Style["0=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["g(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[-1, 10]}, {0, -0.1}]]}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-2, 5],
Rational[2, 5]}, {
Rational[-1, 5],
Rational[2, 5]}}, {{-0.4, 0.4}, {-0.2, 0.4}}], ImageSize -> NCache[{
UpTo[130],
Rational[171, 4]}, {
UpTo[130], 42.75}]], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {57., 42.75}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"ToyRocketModel\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -35.875},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-49.5, -46.375}, {49.5, 30.375}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}, WSM`Typeset`PackagePrivate`appearanceState$527668 = "Minimal", WSM`Typeset`PackagePrivate`expandedeval$527668 = False, WSM`Typeset`PackagePrivate`expandedprimitives$527668, WSM`Typeset`PackagePrivate`expandedopt$527668, WSM`Typeset`PackagePrivate`expandedsize$527668 = {101., 78.75},
WSM`Typeset`PackagePrivate`expandedrange$527668 = {{-50.5, 50.5}, {-47.375, 31.375}}},
DynamicWrapperBox[
DynamicBox[{WSM`Typeset`PackagePrivate`p$527668,
Which[
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$527668 === "Minimal"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquarePlusIconMedium"]], ButtonFunction :> (
If[WSM`Typeset`PackagePrivate`expandedeval$527668 === False, If[
TrueQ[WSMLink`Private`$WSMLinkIsLoaded], WSM`Typeset`PackagePrivate`appearanceState$527668 = "Eval"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"3a5a2fc4-9f09-4f19-a83b-649ddae806dc"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedsize$527668, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$527668}]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedrange$527668, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$527668}]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null, WSM`Typeset`PackagePrivate`appearanceState$527668 = "Expanded"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"3a5a2fc4-9f09-4f19-a83b-649ddae806dc"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = WSM`Typeset`PackagePrivate`expandedsize$527668; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = WSM`Typeset`PackagePrivate`expandedrange$527668; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{6, -6},
Scaled[{0, 1}]],
Scaled[{0, 1}]],
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$527668 === "Expanded"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquareMinusIconMedium"]], ButtonFunction :> (
WSM`Typeset`PackagePrivate`appearanceState$527668 = "Minimal"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"3a5a2fc4-9f09-4f19-a83b-649ddae806dc"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = {101., 78.75}; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = {{-50.5, 50.5}, {-47.375, 31.375}}; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{10, -10},
Scaled[{0, 1}]]], True, {}]},
ImageSizeCache->{{0.5, 100.5}, {-41.25, 36.5}},
TrackedSymbols:>{WSM`Typeset`PackagePrivate`p$527668}], Which[WSM`Typeset`PackagePrivate`appearanceState$527668 === "Minimal", WSM`Typeset`PackagePrivate`p$527668 = {
InsetBox[
GraphicsBox[{
RGBColor[
0.25098039215686274`, 0.25098039215686274`, 0.25098039215686274`],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"x'\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"f(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["``````",
Style["x'", Italic, FontFamily -> "Times New Roman", FontSize -> 12], Style["=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["f(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[1, 10]}, {0, 0.1}]],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"0=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"g(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["````",
Style["0=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["g(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[-1, 10]}, {0, -0.1}]]}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-2, 5],
Rational[2, 5]}, {
Rational[-1, 5],
Rational[2, 5]}}, {{-0.4, 0.4}, {-0.2, 0.4}}], ImageSize -> NCache[{
UpTo[130],
Rational[171, 4]}, {
UpTo[130], 42.75}]], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {57., 42.75}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"ToyRocketModel\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -35.875},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-49.5, -46.375}, {49.5, 30.375}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}; Null, WSM`Typeset`PackagePrivate`appearanceState$527668 === "Eval", WSM`Typeset`PackagePrivate`p$527668 = {{
EdgeForm[
WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$527668, 1, 1], Part[
WSM`Typeset`PackagePrivate`expandedrange$527668, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$527668, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$527668, 2, 2]}, RoundingRadius -> Offset[5]]},
InsetBox[
Evaluate[
ToBoxes[
ProgressIndicator[Appearance -> "Percolate"], StandardForm]]]}; Module[{WSM`Typeset`PackagePrivate`md$}, {WSM`Typeset`PackagePrivate`expandedsize$527668, WSM`Typeset`PackagePrivate`md$} = WSM`Typeset`PackagePrivate`getExpandedGraphic[
"DocumentationExamples.Simulation.ToyRocketModel", "3a5a2fc4-9f09-4f19-a83b-649ddae806dc"]; {WSM`Typeset`PackagePrivate`expandedprimitives$527668, WSM`Typeset`PackagePrivate`expandedopt$527668} = WSM`Typeset`PackagePrivate`separateGraphics[
WSM`Typeset`PackagePrivate`md$]; WSM`Typeset`PackagePrivate`expandedrange$527668 = Replace[PlotRange,
Flatten[WSM`Typeset`PackagePrivate`expandedopt$527668]]; WSM`Typeset`PackagePrivate`expandedeval$527668 = True; WSM`Typeset`PackagePrivate`expandedprimitives$527668 = Join[
WSM`Typeset`PackagePrivate`expandedprimitives$527668, {{ EdgeForm[WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$527668, 1,
1], Part[
WSM`Typeset`PackagePrivate`expandedrange$527668, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$527668, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$527668, 2, 2]}, RoundingRadius -> Offset[5]]},
With[{WSM`Typeset`PackagePrivate`leftmost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$527668, 1,
1], WSM`Typeset`PackagePrivate`bottommost$ = Part[WSM`Typeset`PackagePrivate`expandedrange$527668, 2, 1]}, { RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["ToyRocketModel", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm],
Offset[{12, 12}, {WSM`Typeset`PackagePrivate`leftmost$, WSM`Typeset`PackagePrivate`bottommost$}], {-1, 0}]}]}]; Null]; WSM`Typeset`PackagePrivate`appearanceState$527668 = "Expanded"; Null, WSM`Typeset`PackagePrivate`appearanceState$527668 === "Expanded", WSM`Typeset`PackagePrivate`p$527668 = WSM`Typeset`PackagePrivate`expandedprimitives$527668; Null]; Null,
ImageSizeCache->{{0.5, 100.5}, {-41.25, 36.5}},
SynchronousUpdating->False,
TrackedSymbols:>{WSM`Typeset`PackagePrivate`appearanceState$527668}],
Initialization:>(
WSM`Typeset`PackagePrivate`expandedeval$527668 = Not[
WSM`Typeset`PackagePrivate`expandedeval$527668]; WSM`Typeset`PackagePrivate`expandedeval$527668 = Not[
WSM`Typeset`PackagePrivate`expandedeval$527668]; Null)],
"DocumentationExamples.Simulation.ToyRocketModel"],
WSM`ModelTag["DocumentationExamples.Simulation.ToyRocketModel"]],
SelectWithContents -> True,
Editable -> False,
BoxID -> "3a5a2fc4-9f09-4f19-a83b-649ddae806dc",
ContentSelectable->False,
DefaultBaseStyle->{"Graphics", FrontEnd`GraphicsHighlightColor -> RGBColor[0, 0.46775, 1], ComponentwiseContextMenu -> {"GraphicsBox" -> {
MenuItem[
"Copy Model",
KernelExecute[
CopyToClipboard[
ReleaseHold[
MakeExpression[
MakeBoxes[
SystemModel["DocumentationExamples.Simulation.ToyRocketModel"]], StandardForm]]]], MenuEvaluator -> Automatic],
MenuItem["Copy Model Name",
KernelExecute[
CopyToClipboard[(
"\"" <> "DocumentationExamples.Simulation.ToyRocketModel") <> "\""]], MenuEvaluator -> Automatic], Delimiter,
MenuItem["Simulate Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelSimulate", "[", "\"DocumentationExamples.Simulation.ToyRocketModel\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Preferred Plots in Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelPlot", "[", "\"DocumentationExamples.Simulation.ToyRocketModel\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Model Information",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModel", "[",
RowBox[{"\"DocumentationExamples.Simulation.ToyRocketModel\"", ",", "\"Summary\""}], "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]], Delimiter,
MenuItem["Open in System Modeler Model Center",
KernelExecute[
WSMLink`WSMModelCenter[
"DocumentationExamples.Simulation.ToyRocketModel"]], MenuEvaluator -> Automatic],
MenuItem["Open in System Modeler Simulation Center",
KernelExecute[
WSMLink`WSMSimulationCenter[
"DocumentationExamples.Simulation.ToyRocketModel"]], MenuEvaluator -> Automatic]}}},
ImageSize->{101., 78.75},
PlotRange->{{-50.5, 50.5}, {-47.375, 31.375}}]\), {"veMag"}, {"k"}, PlotRange -> All]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/2add36f900e417ab.png) |
| Out[20]= | 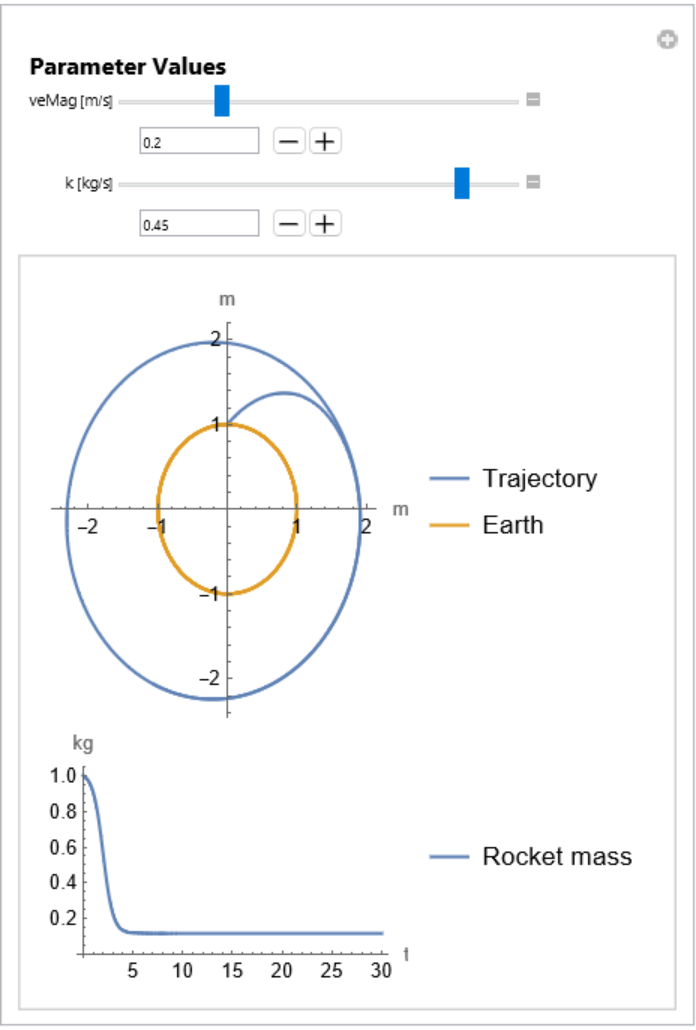 |
Study the model of a thumb-wheel potentiometer connected in a rheostat configuration:
| In[21]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/af1d479d-614f-4889-82fd-d180be5b220a"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/5cb65cb7a71298b1.png) |
| Out[21]= | 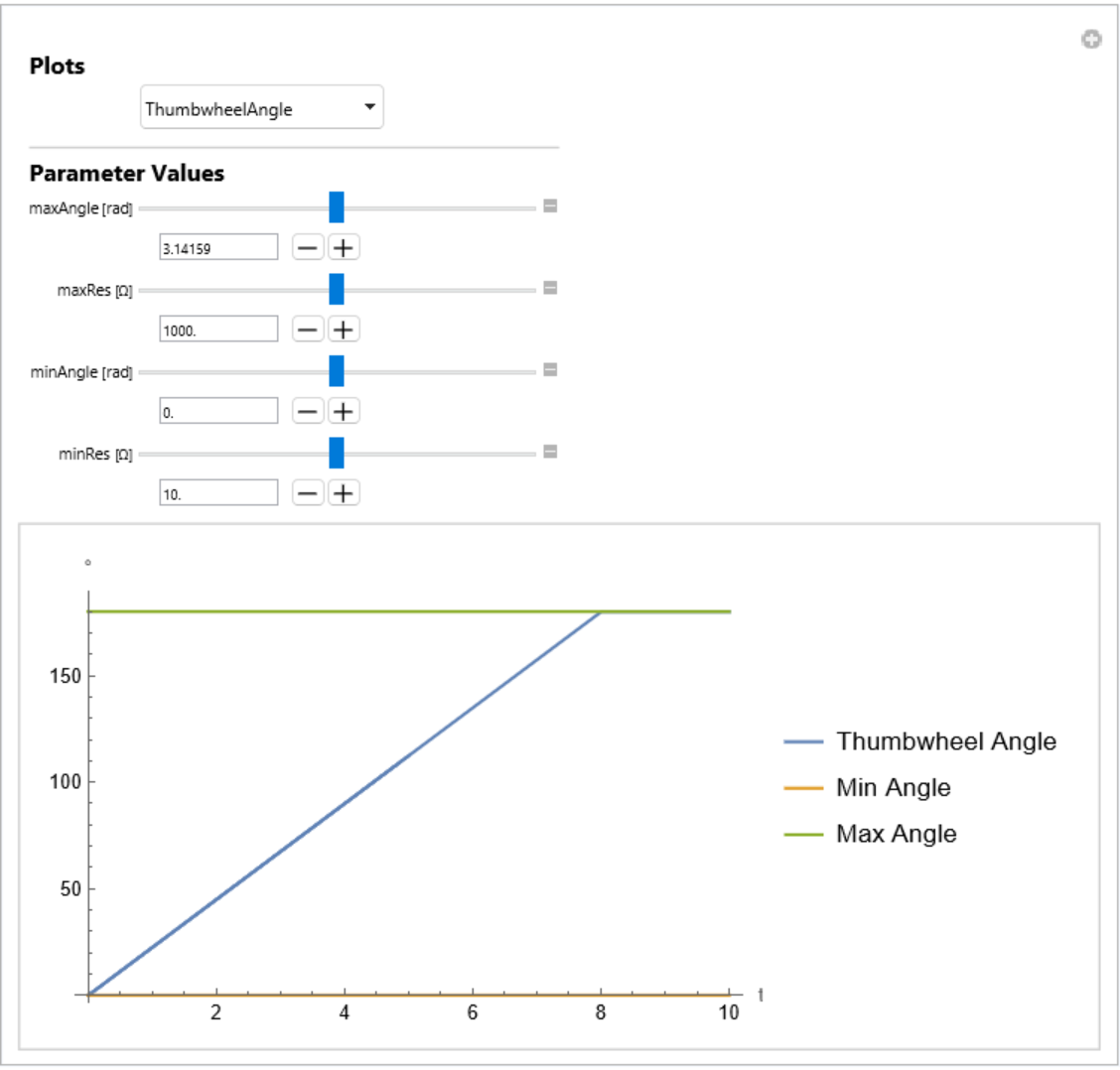 |
Use Setting on the output to access the displayed plots:
| In[22]:= | ![ResourceFunction["SystemModelManipulate"][\!\(\*
GraphicsBox[
TagBox[
TooltipBox[
DynamicModuleBox[{WSM`Typeset`PackagePrivate`p$553791 = {
InsetBox[
GraphicsBox[{
RGBColor[
0.25098039215686274`, 0.25098039215686274`, 0.25098039215686274`],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"x'\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"f(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["``````",
Style["x'", Italic, FontFamily -> "Times New Roman", FontSize -> 12], Style["=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["f(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[1, 10]}, {0, 0.1}]],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"0=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"g(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["````",
Style["0=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["g(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[-1, 10]}, {0, -0.1}]]}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-2, 5],
Rational[2, 5]}, {
Rational[-1, 5],
Rational[2, 5]}}, {{-0.4, 0.4}, {-0.2, 0.4}}], ImageSize -> NCache[{
UpTo[130],
Rational[171, 4]}, {
UpTo[130], 42.75}]], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {57., 42.75}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"Lissajous\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -35.875},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-37.5, -46.375}, {37.5, 30.375}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}, WSM`Typeset`PackagePrivate`appearanceState$553791 = "Minimal",
WSM`Typeset`PackagePrivate`expandedeval$553791 = False, WSM`Typeset`PackagePrivate`expandedprimitives$553791, WSM`Typeset`PackagePrivate`expandedopt$553791, WSM`Typeset`PackagePrivate`expandedsize$553791 = {77., 78.75},
WSM`Typeset`PackagePrivate`expandedrange$553791 = {{-38.5, 38.5}, {-47.375, 31.375}}},
DynamicWrapperBox[
DynamicBox[{WSM`Typeset`PackagePrivate`p$553791,
Which[
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$553791 === "Minimal"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquarePlusIconMedium"]], ButtonFunction :> (
If[WSM`Typeset`PackagePrivate`expandedeval$553791 === False, If[
TrueQ[WSMLink`Private`$WSMLinkIsLoaded], WSM`Typeset`PackagePrivate`appearanceState$553791 = "Eval"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"a728a951-84aa-4613-bfb5-a0a6ca79e142"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedsize$553791, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$553791}]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedrange$553791, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$553791}]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null, WSM`Typeset`PackagePrivate`appearanceState$553791 = "Expanded"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"a728a951-84aa-4613-bfb5-a0a6ca79e142"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = WSM`Typeset`PackagePrivate`expandedsize$553791; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = WSM`Typeset`PackagePrivate`expandedrange$553791; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{6, -6},
Scaled[{0, 1}]],
Scaled[{0, 1}]],
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$553791 === "Expanded"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquareMinusIconMedium"]], ButtonFunction :> (
WSM`Typeset`PackagePrivate`appearanceState$553791 = "Minimal"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"a728a951-84aa-4613-bfb5-a0a6ca79e142"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = {77., 78.75}; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = {{-38.5, 38.5}, {-47.375, 31.375}}; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{10, -10},
Scaled[{0, 1}]]], True, {}]},
ImageSizeCache->{{0.5, 76.5}, {-41.25, 36.5}},
TrackedSymbols:>{WSM`Typeset`PackagePrivate`p$553791}], Which[WSM`Typeset`PackagePrivate`appearanceState$553791 === "Minimal", WSM`Typeset`PackagePrivate`p$553791 = {
InsetBox[
GraphicsBox[{
RGBColor[
0.25098039215686274`, 0.25098039215686274`, 0.25098039215686274`],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"x'\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"f(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["``````",
Style["x'", Italic, FontFamily -> "Times New Roman", FontSize -> 12], Style["=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["f(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[1, 10]}, {0, 0.1}]],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"0=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"g(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["````",
Style["0=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["g(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[-1, 10]}, {0, -0.1}]]}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-2, 5],
Rational[2, 5]}, {
Rational[-1, 5],
Rational[2, 5]}}, {{-0.4, 0.4}, {-0.2, 0.4}}], ImageSize -> NCache[{
UpTo[130],
Rational[171, 4]}, {
UpTo[130], 42.75}]], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {57., 42.75}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"Lissajous\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -35.875},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-37.5, -46.375}, {37.5, 30.375}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}; Null, WSM`Typeset`PackagePrivate`appearanceState$553791 === "Eval", WSM`Typeset`PackagePrivate`p$553791 = {{
EdgeForm[
WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$553791, 1, 1], Part[
WSM`Typeset`PackagePrivate`expandedrange$553791, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$553791, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$553791, 2, 2]}, RoundingRadius -> Offset[5]]},
InsetBox[
Evaluate[
ToBoxes[
ProgressIndicator[Appearance -> "Percolate"], StandardForm]]]}; Module[{WSM`Typeset`PackagePrivate`md$}, {WSM`Typeset`PackagePrivate`expandedsize$553791, WSM`Typeset`PackagePrivate`md$} = WSM`Typeset`PackagePrivate`getExpandedGraphic[
"DocumentationExamples.Simulation.Lissajous", "a728a951-84aa-4613-bfb5-a0a6ca79e142"]; {WSM`Typeset`PackagePrivate`expandedprimitives$553791, WSM`Typeset`PackagePrivate`expandedopt$553791} = WSM`Typeset`PackagePrivate`separateGraphics[
WSM`Typeset`PackagePrivate`md$]; WSM`Typeset`PackagePrivate`expandedrange$553791 = Replace[PlotRange,
Flatten[WSM`Typeset`PackagePrivate`expandedopt$553791]]; WSM`Typeset`PackagePrivate`expandedeval$553791 = True; WSM`Typeset`PackagePrivate`expandedprimitives$553791 = Join[
WSM`Typeset`PackagePrivate`expandedprimitives$553791, {{ EdgeForm[WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$553791, 1, 1], Part[WSM`Typeset`PackagePrivate`expandedrange$553791, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$553791, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$553791, 2, 2]}, RoundingRadius -> Offset[5]]},
With[{WSM`Typeset`PackagePrivate`leftmost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$553791, 1, 1], WSM`Typeset`PackagePrivate`bottommost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$553791, 2, 1]}, {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["Lissajous", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm],
Offset[{12, 12}, {WSM`Typeset`PackagePrivate`leftmost$, WSM`Typeset`PackagePrivate`bottommost$}], {-1, 0}]}]}]; Null]; WSM`Typeset`PackagePrivate`appearanceState$553791 = "Expanded"; Null, WSM`Typeset`PackagePrivate`appearanceState$553791 === "Expanded", WSM`Typeset`PackagePrivate`p$553791 = WSM`Typeset`PackagePrivate`expandedprimitives$553791; Null]; Null,
ImageSizeCache->{{0.5, 76.5}, {-41.25, 36.5}},
SynchronousUpdating->False,
TrackedSymbols:>{WSM`Typeset`PackagePrivate`appearanceState$553791}],
Initialization:>(
WSM`Typeset`PackagePrivate`expandedeval$553791 = Not[
WSM`Typeset`PackagePrivate`expandedeval$553791]; WSM`Typeset`PackagePrivate`expandedeval$553791 = Not[
WSM`Typeset`PackagePrivate`expandedeval$553791]; Null)],
"DocumentationExamples.Simulation.Lissajous"],
WSM`ModelTag["DocumentationExamples.Simulation.Lissajous"]],
SelectWithContents -> True,
Editable -> False,
BoxID -> "a728a951-84aa-4613-bfb5-a0a6ca79e142",
ContentSelectable->False,
DefaultBaseStyle->{"Graphics", FrontEnd`GraphicsHighlightColor -> RGBColor[0, 0.46775, 1], ComponentwiseContextMenu -> {"GraphicsBox" -> {
MenuItem[
"Copy Model",
KernelExecute[
CopyToClipboard[
ReleaseHold[
MakeExpression[
MakeBoxes[
SystemModel["DocumentationExamples.Simulation.Lissajous"]], StandardForm]]]], MenuEvaluator -> Automatic],
MenuItem["Copy Model Name",
KernelExecute[
CopyToClipboard[(
"\"" <> "DocumentationExamples.Simulation.Lissajous") <> "\""]], MenuEvaluator -> Automatic], Delimiter,
MenuItem["Simulate Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelSimulate", "[", "\"DocumentationExamples.Simulation.Lissajous\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Preferred Plots in Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelPlot", "[", "\"DocumentationExamples.Simulation.Lissajous\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Model Information",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModel", "[",
RowBox[{"\"DocumentationExamples.Simulation.Lissajous\"", ",", "\"Summary\""}], "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]], Delimiter,
MenuItem["Open in System Modeler Model Center",
KernelExecute[
WSMLink`WSMModelCenter["DocumentationExamples.Simulation.Lissajous"]],
MenuEvaluator -> Automatic],
MenuItem["Open in System Modeler Simulation Center",
KernelExecute[
WSMLink`WSMSimulationCenter[
"DocumentationExamples.Simulation.Lissajous"]], MenuEvaluator -> Automatic]}}},
ImageSize->{77., 78.75},
PlotRange->{{-38.5, 38.5}, {-47.375, 31.375}}]\)] // Setting](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/7f4f819a404f0e14.png) |
| Out[22]= | 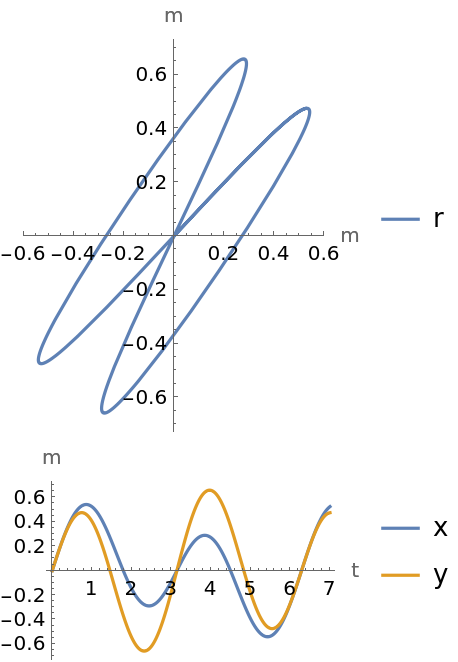 |
Observe the trajectories of 5 balls released inside a room, varying the size of the room using parameters:
| In[23]:= | ![ResourceFunction["SystemModelManipulate"][\!\(\*
GraphicsBox[
TagBox[
TooltipBox[
DynamicModuleBox[{WSM`Typeset`PackagePrivate`p$4138800 = {
InsetBox[
GraphicsBox[{
RGBColor[
0.25098039215686274`, 0.25098039215686274`, 0.25098039215686274`],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"x'\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"f(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["``````",
Style["x'", Italic, FontFamily -> "Times New Roman", FontSize -> 12], Style["=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["f(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[1, 10]}, {0, 0.1}]],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"0=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"g(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["````",
Style["0=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["g(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[-1, 10]}, {0, -0.1}]]}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-2, 5],
Rational[2, 5]}, {
Rational[-1, 5],
Rational[2, 5]}}, {{-0.4, 0.4}, {-0.2, 0.4}}], ImageSize -> NCache[{
UpTo[130],
Rational[171, 4]}, {
UpTo[130], 42.75}]], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {57., 42.75}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"BouncingBalls2D\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -35.875},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-53., -46.375}, {53., 30.375}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}, WSM`Typeset`PackagePrivate`appearanceState$4138800 = "Minimal",
WSM`Typeset`PackagePrivate`expandedeval$4138800 = False, WSM`Typeset`PackagePrivate`expandedprimitives$4138800, WSM`Typeset`PackagePrivate`expandedopt$4138800, WSM`Typeset`PackagePrivate`expandedsize$4138800 = {108., 78.75}, WSM`Typeset`PackagePrivate`expandedrange$4138800 = {{-54., 54.}, {-47.375, 31.375}}},
DynamicWrapperBox[
DynamicBox[{WSM`Typeset`PackagePrivate`p$4138800,
Which[
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$4138800 === "Minimal"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquarePlusIconMedium"]], ButtonFunction :> (
If[WSM`Typeset`PackagePrivate`expandedeval$4138800 === False, If[
TrueQ[WSMLink`Private`$WSMLinkIsLoaded], WSM`Typeset`PackagePrivate`appearanceState$4138800 = "Eval"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"5bad8104-e857-4a38-89d1-d042f94cc5bd"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedsize$4138800, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$4138800}]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = Dynamic[
WSM`Typeset`PackagePrivate`expandedrange$4138800, TrackedSymbols :> {WSM`Typeset`PackagePrivate`expandedeval$4138800}]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null, WSM`Typeset`PackagePrivate`appearanceState$4138800 = "Expanded"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"5bad8104-e857-4a38-89d1-d042f94cc5bd"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = WSM`Typeset`PackagePrivate`expandedsize$4138800; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = WSM`Typeset`PackagePrivate`expandedrange$4138800; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{6, -6},
Scaled[{0, 1}]],
Scaled[{0, 1}]],
And["normal" === "normal", WSM`Typeset`PackagePrivate`appearanceState$4138800 === "Expanded"],
InsetBox[
BoxData[
FormBox[
ButtonBox[
DynamicBox[
FEPrivate`FrontEndResource["FEBitmaps", "SquareMinusIconMedium"]], ButtonFunction :> (
WSM`Typeset`PackagePrivate`appearanceState$4138800 = "Minimal"; Module[{WSM`Typeset`PackagePrivate`cellobj$, WSM`Typeset`PackagePrivate`cellEditDup$},
If[
MathLink`CallFrontEnd[
FrontEnd`BoxReferenceFind[
FE`BoxReference[
EvaluationBox[], {
FE`Parent[
"5bad8104-e857-4a38-89d1-d042f94cc5bd"]}]]], WSM`Typeset`PackagePrivate`cellobj$ = EvaluationCell[]; WSM`Typeset`PackagePrivate`cellEditDup$ = CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate]; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = False]; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, ImageSize}] = {108., 78.75}; CurrentValue[
FrontEnd`SelectionObject, {GraphicsBoxOptions, PlotRange}] = {{-54., 54.}, {-47.375, 31.375}}; If[
WSM`Typeset`PackagePrivate`cellEditDup$, CurrentValue[
WSM`Typeset`PackagePrivate`cellobj$, CellEditDuplicate] = True]; Null]]; Null), Appearance -> None, ContentPadding -> False, ImageSize -> {Automatic, Automatic}, Evaluator -> Automatic, Method -> "Preemptive"], TraditionalForm]],
Offset[{10, -10},
Scaled[{0, 1}]]], True, {}]},
ImageSizeCache->{{0.5, 107.5}, {-41.25, 36.5}},
TrackedSymbols:>{WSM`Typeset`PackagePrivate`p$4138800}], Which[WSM`Typeset`PackagePrivate`appearanceState$4138800 === "Minimal", WSM`Typeset`PackagePrivate`p$4138800 = {
InsetBox[
GraphicsBox[{
RGBColor[
0.25098039215686274`, 0.25098039215686274`, 0.25098039215686274`],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"x'\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"f(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["``````",
Style["x'", Italic, FontFamily -> "Times New Roman", FontSize -> 12], Style["=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["f(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[1, 10]}, {0, 0.1}]],
InsetBox[
FormBox[
InterpretationBox[
"\"\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"0=\\\\\\\"\\\", Plain, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\\!\\(\\*FormBox[StyleBox[\\\"\\\\\\\"g(x,y,t)\\\\\\\"\\\", Italic, Rule[FontFamily, \\\"Times New Roman\\\"], Rule[FontSize, 12], Rule[StripOnInput, False]], TraditionalForm]\\)\"",
StringForm["````",
Style["0=", Plain, FontFamily -> "Times New Roman", FontSize -> 12],
Style["g(x,y,t)", Italic, FontFamily -> "Times New Roman", FontSize -> 12]], Editable -> False], TraditionalForm],
NCache[{0,
Rational[-1, 10]}, {0, -0.1}]]}, PlotRangePadding -> None, ContentSelectable -> False, PlotRange -> NCache[{{
Rational[-2, 5],
Rational[2, 5]}, {
Rational[-1, 5],
Rational[2, 5]}}, {{-0.4, 0.4}, {-0.2, 0.4}}], ImageSize -> NCache[{
UpTo[130],
Rational[171, 4]}, {
UpTo[130], 42.75}]], {0, 0},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}], {57., 42.75}], {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["\"BouncingBalls2D\"", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm], {0, -35.875},
ImageScaled[{
Rational[1, 2],
Rational[1, 2]}]]}, {
EdgeForm[
RGBColor[0.5843137254901961, 0.807843137254902, 0.9411764705882353]], FaceForm[None],
RectangleBox[{-53., -46.375}, {53., 30.375}, RoundingRadius -> Offset[5]]},
InsetBox[
BoxData[
FormBox[
GraphicsBox[
TagBox[
RasterBox[CompressedData["
1:eJzN1VlI1FEUx/FJzT3TxkooKitaaHkoIYOKjAha6MESErJwyMSgkUahlRZ6
CqJoh6CihbaHiuihoH2lImgvMtozjTKzUtP09L3c86c/k+NGD/3hM/7nD/Ob
M+eee031FWbOD/N4PEXRvGTmLs4IBHKXzkjkTZa/qCDfnzdvsr84Lz8vkO4L
52GKioC0fDWqX/iJH6jAG9zFaWxFAcajB2I8erUi3/mOBtShGl/wHg9xFjtR
iEnohbh25tejBpUoxWNcxC4swlT0Rfw/yP+AJziP3Qhofn8ktCHf6b+TX635
pj+PcE5sf0z9U5CKTu3IN+tr+u+s71vcF7u+27FQ/vS/Lf1xanfm5zs+4SXu
4CQ2Ih/j0FNav77BtZvefxXb+xLcwBGsxVyMQndEt5DfKH/3vVZr/yx29h+I
7b2ZnSWYieHogo6u/MYQnJ7Ua1+cdS3T2m/iONZjASaKXdvOCHPlN4TgZNdq
tunLR7wSu2/NvjJzuQLZSEMKYj2uSzOC1WnNNdqTSs1+LXbPXsZhrNPazdwM
RJK7N5pfozW6mWdmDqvEzmKZ1m2yr+IYNqEYWRiptcd7gi793Sbnm/6t0nor
tOZ3eI57uKI934ZlyMEY9EEiIprIN7NWrlnlqlRn5IXYM+a22HPgKLZgOXzI
wAB4xXVmBuU/1Xko0TqfaabZm7dwCaewDxvEzuIczR6CrohDhxD55vPXxO6V
69rfCziDE9iPzVgDP2aJPecHo5vpubjmsYn8vTiIQ+oA9mCH2NleJfbsysU0
pKOfq+7wUNmab9Zppda3Wu/NsyKx/5NmYzrGYpjY88Xs0djm6nblm32drbOQ
o/fmmTnLJ2A0hoo9F5ORgKiWcl355swYIXb/pem9eTYIvcXOtVdzY1pTc1B+
kv7eZOXV90maafoQ2dZcV364fj5KRapm1+1/uX4DOnc/KA==
"], {{0, 24.}, {24., 0}}, {0, 255}, ColorFunction -> RGBColor, ImageResolution -> {72, 72}],
BoxForm`ImageTag["Byte", ColorSpace -> "RGB", Interleaving -> True], Selectable -> False], DefaultBaseStyle -> "ImageGraphics", ImageSizeRaw -> {24., 24.}, PlotRange -> {{0, 24.}, {0, 24.}}], TraditionalForm]],
Offset[{6, -6},
ImageScaled[{0, 1}]],
ImageScaled[{0, 1}], {24, 24}]}; Null, WSM`Typeset`PackagePrivate`appearanceState$4138800 === "Eval", WSM`Typeset`PackagePrivate`p$4138800 = {{
EdgeForm[
WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$4138800, 1, 1], Part[
WSM`Typeset`PackagePrivate`expandedrange$4138800, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$4138800, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$4138800, 2, 2]}, RoundingRadius -> Offset[5]]},
InsetBox[
Evaluate[
ToBoxes[
ProgressIndicator[Appearance -> "Percolate"], StandardForm]]]}; Module[{WSM`Typeset`PackagePrivate`md$}, {WSM`Typeset`PackagePrivate`expandedsize$4138800, WSM`Typeset`PackagePrivate`md$} = WSM`Typeset`PackagePrivate`getExpandedGraphic[
"EducationExamples.Physics.BouncingBalls.BouncingBalls2D", "5bad8104-e857-4a38-89d1-d042f94cc5bd"]; {WSM`Typeset`PackagePrivate`expandedprimitives$4138800, WSM`Typeset`PackagePrivate`expandedopt$4138800} = WSM`Typeset`PackagePrivate`separateGraphics[
WSM`Typeset`PackagePrivate`md$]; WSM`Typeset`PackagePrivate`expandedrange$4138800 = Replace[PlotRange,
Flatten[WSM`Typeset`PackagePrivate`expandedopt$4138800]]; WSM`Typeset`PackagePrivate`expandedeval$4138800 = True; WSM`Typeset`PackagePrivate`expandedprimitives$4138800 = Join[ WSM`Typeset`PackagePrivate`expandedprimitives$4138800, {{ EdgeForm[WSM`Typeset`PackagePrivate`$bordercolor],
FaceForm[None],
RectangleBox[{
Part[
WSM`Typeset`PackagePrivate`expandedrange$4138800, 1, 1], Part[WSM`Typeset`PackagePrivate`expandedrange$4138800, 2, 1] + 1}, {Part[
WSM`Typeset`PackagePrivate`expandedrange$4138800, 1, 2] - 1,
Part[WSM`Typeset`PackagePrivate`expandedrange$4138800, 2, 2]}, RoundingRadius -> Offset[5]]},
With[{WSM`Typeset`PackagePrivate`leftmost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$4138800, 1, 1], WSM`Typeset`PackagePrivate`bottommost$ = Part[
WSM`Typeset`PackagePrivate`expandedrange$4138800, 2, 1]}, {
RGBColor[
0.43137254901960786`, 0.43137254901960786`, 0.43137254901960786`],
InsetBox[
FormBox[
StyleBox["BouncingBalls2D", FontSize -> 9, FontFamily -> "Helvetica", StripOnInput -> False], TraditionalForm],
Offset[{12, 12}, {WSM`Typeset`PackagePrivate`leftmost$, WSM`Typeset`PackagePrivate`bottommost$}], {-1, 0}]}]}]; Null]; WSM`Typeset`PackagePrivate`appearanceState$4138800 = "Expanded"; Null, WSM`Typeset`PackagePrivate`appearanceState$4138800 === "Expanded", WSM`Typeset`PackagePrivate`p$4138800 = WSM`Typeset`PackagePrivate`expandedprimitives$4138800; Null]; Null,
ImageSizeCache->{{0.5, 107.5}, {-41.25, 36.5}},
SynchronousUpdating->False,
TrackedSymbols:>{WSM`Typeset`PackagePrivate`appearanceState$4138800}],
Initialization:>(
WSM`Typeset`PackagePrivate`expandedeval$4138800 = Not[
WSM`Typeset`PackagePrivate`expandedeval$4138800]; WSM`Typeset`PackagePrivate`expandedeval$4138800 = Not[
WSM`Typeset`PackagePrivate`expandedeval$4138800]; Null)],
"EducationExamples.Physics.BouncingBalls.BouncingBalls2D"],
WSM`ModelTag[
"EducationExamples.Physics.BouncingBalls.BouncingBalls2D"]],
Editable -> False,
SelectWithContents -> True,
BoxID -> "5bad8104-e857-4a38-89d1-d042f94cc5bd",
ContentSelectable->False,
DefaultBaseStyle->{"Graphics", FrontEnd`GraphicsHighlightColor -> RGBColor[0, 0.46775, 1], ComponentwiseContextMenu -> {"GraphicsBox" -> {
MenuItem[
"Copy Model",
KernelExecute[
CopyToClipboard[
ReleaseHold[
MakeExpression[
MakeBoxes[
SystemModel[
"EducationExamples.Physics.BouncingBalls.BouncingBalls2D"]], StandardForm]]]], MenuEvaluator -> Automatic],
MenuItem["Copy Model Name",
KernelExecute[
CopyToClipboard[(
"\"" <> "EducationExamples.Physics.BouncingBalls.BouncingBalls2D") <> "\""]], MenuEvaluator -> Automatic], Delimiter,
MenuItem["Simulate Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelSimulate", "[", "\"EducationExamples.Physics.BouncingBalls.BouncingBalls2D\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Preferred Plots in Model",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModelPlot", "[", "\"EducationExamples.Physics.BouncingBalls.BouncingBalls2D\"", "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]],
MenuItem["Show Model Information",
FrontEndExecute[{
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], After, Cell],
FrontEnd`NotebookWrite[
FrontEnd`InputNotebook[],
Cell[
BoxData[
RowBox[{"SystemModel", "[",
RowBox[{"\"EducationExamples.Physics.BouncingBalls.BouncingBalls2D\"",
",", "\"Summary\""}], "]"}]], "PastedInput"]],
FrontEnd`SelectionMove[
FrontEnd`InputNotebook[], Previous, Cell],
FrontEnd`SelectionEvaluateCreateCell[
FrontEnd`InputNotebook[]]}]], Delimiter,
MenuItem["Open in System Modeler Model Center",
KernelExecute[
WSMLink`WSMModelCenter[
"EducationExamples.Physics.BouncingBalls.BouncingBalls2D"]], MenuEvaluator -> Automatic],
MenuItem["Open in System Modeler Simulation Center",
KernelExecute[
WSMLink`WSMSimulationCenter[
"EducationExamples.Physics.BouncingBalls.BouncingBalls2D"]], MenuEvaluator -> Automatic]}}},
ImageSize->{108., 78.75},
PlotRange->{{-54., 54.}, {-47.375, 31.375}}]\), {"wallx", 5, 10}, {"wally", 5, 10}, PlotRange -> {{-10, 10}, {-10, 10}}, ImageSize -> 300]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1-0-0/478a0a770f76b195.png) |
| Out[23]= | 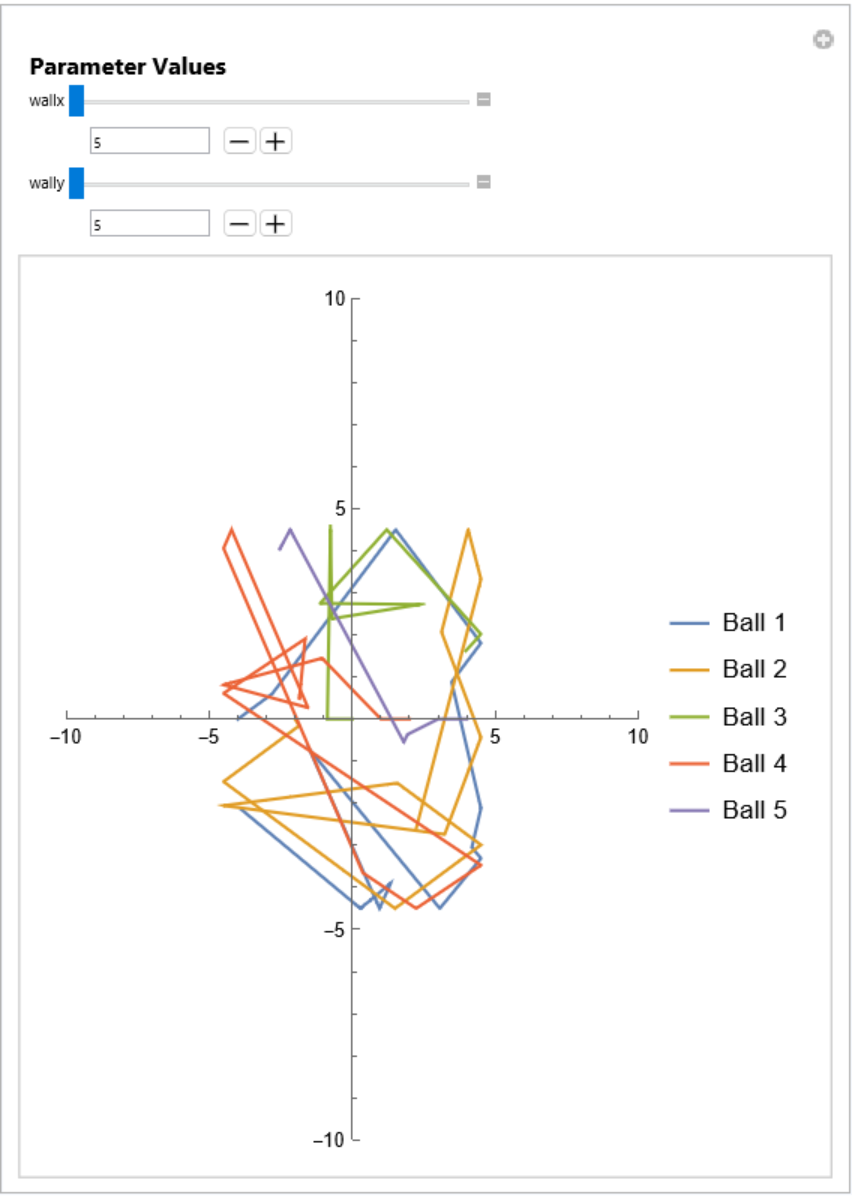 |
This work is licensed under a Creative Commons Attribution 4.0 International License