Wolfram Function Repository
Instant-use add-on functions for the Wolfram Language
Function Repository Resource:
Manipulate parameters or initial values in plots of model simulation results
ResourceFunction["SystemModelManipulate"][model] creates a Manipulate object from model showing the resulting plots of a simulation with controllers for parameters and initial values. | |
ResourceFunction["SystemModelManipulate"][model,{u}] creates a control only for the top-level parameter or variable u. | |
ResourceFunction["SystemModelManipulate"][model,{u,umin,umax}] allows the value for u to vary between umin and umax. | |
ResourceFunction["SystemModelManipulate"][model,{{u,uinit},umin,umax,…}] takes the initial value of u to be uinit. | |
ResourceFunction["SystemModelManipulate"][model,{u,{u1,u2,…}}] allows u to take on discrete values u1,u2,…. | |
ResourceFunction["SystemModelManipulate"][model,{u,func}] creates a control from the function func. | |
ResourceFunction["SystemModelManipulate"][model,{u,…},{v,…},…] provides controls to manipuate each u,v,…. |
| SystemModel[…] | general system model |
| StateSpaceModel[…] | state-space model |
| TransferFunctionModel[…] | transfer function model |
| AffineStateSpaceModel[…] | affine state-space model |
| NonlinearStateSpaceModel[…] | nonlinear state-space model |
| DiscreteInputOutputModel[…] | discrete input-output model |
| "ParameterValues" | {p1→val1,…} | set parameter pi to value vali |
| "InitialValues" | {v1→val1,…} | set initial value of variable vi to vali |
| "Inputs" | {in1→fun1,…} | set input ini to value funi[t] at time t |
| Appearance | "Open" | appearance of controls for real and integer values |
| ContinuousAction | False | whether to update continuously when controls are changed |
| SynchronousInitialization | False | whether to perform initialization synchronously |
| SynchronousUpdating | False | whether to update synchronously |
Create a dynamic interface for a model simulation:
| In[1]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/986c6990-5a44-4fb2-97e8-fc72bb6ea190"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/3defac335107adcd.png) |
| Out[1]= | 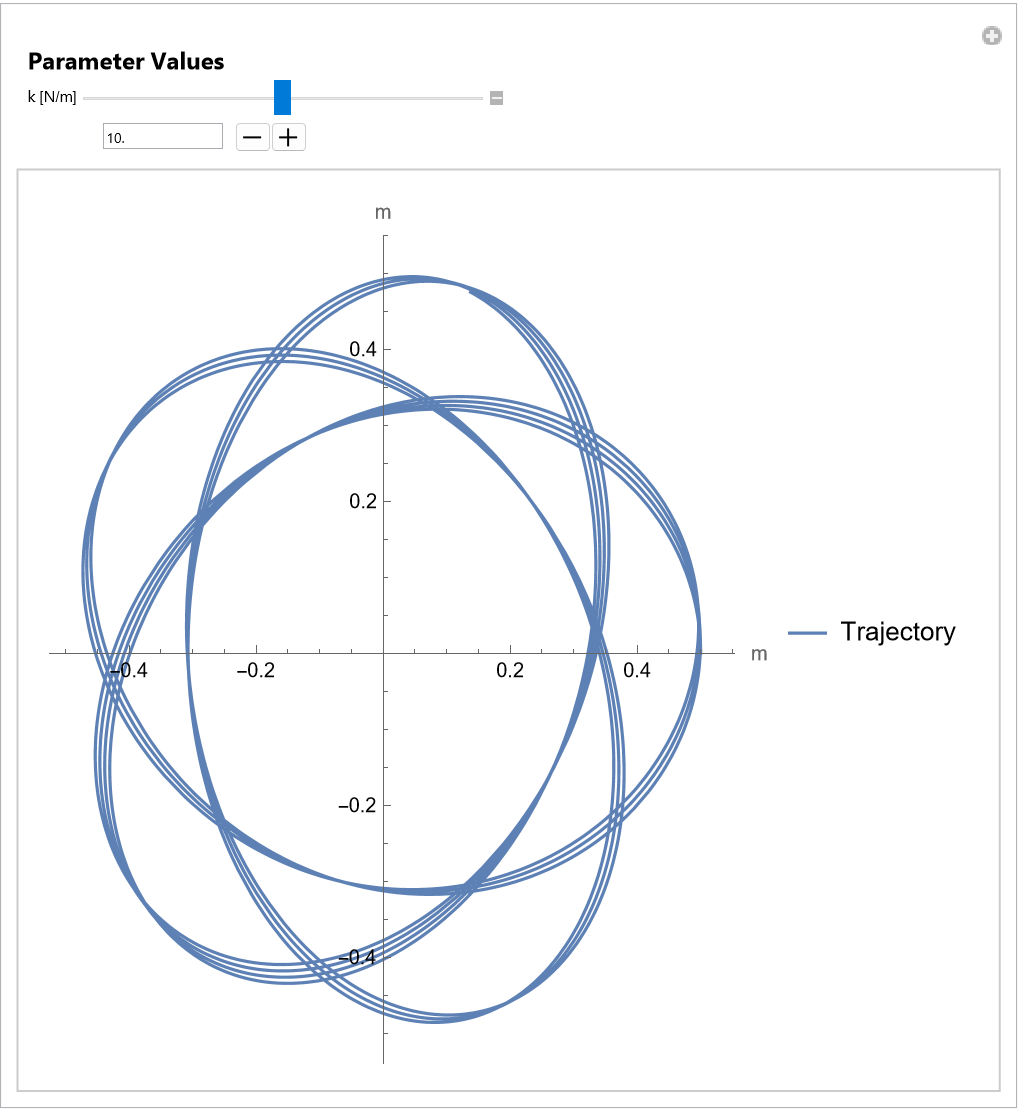 |
Manipulate an initial value in a simulation:
| In[2]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/8054af49-c6ce-4037-9437-b1f9e1a116ce"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/4d1533e92e7fa98f.png) |
| Out[2]= | 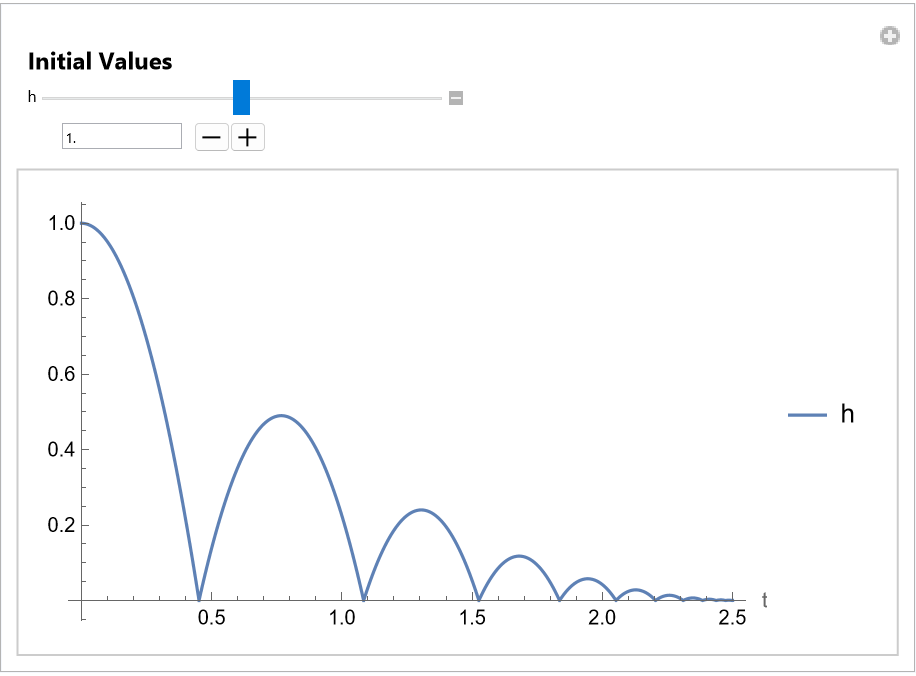 |
Specify the model by name and manipulate a specific parameter value in a simulation:
| In[3]:= |
| Out[3]= | 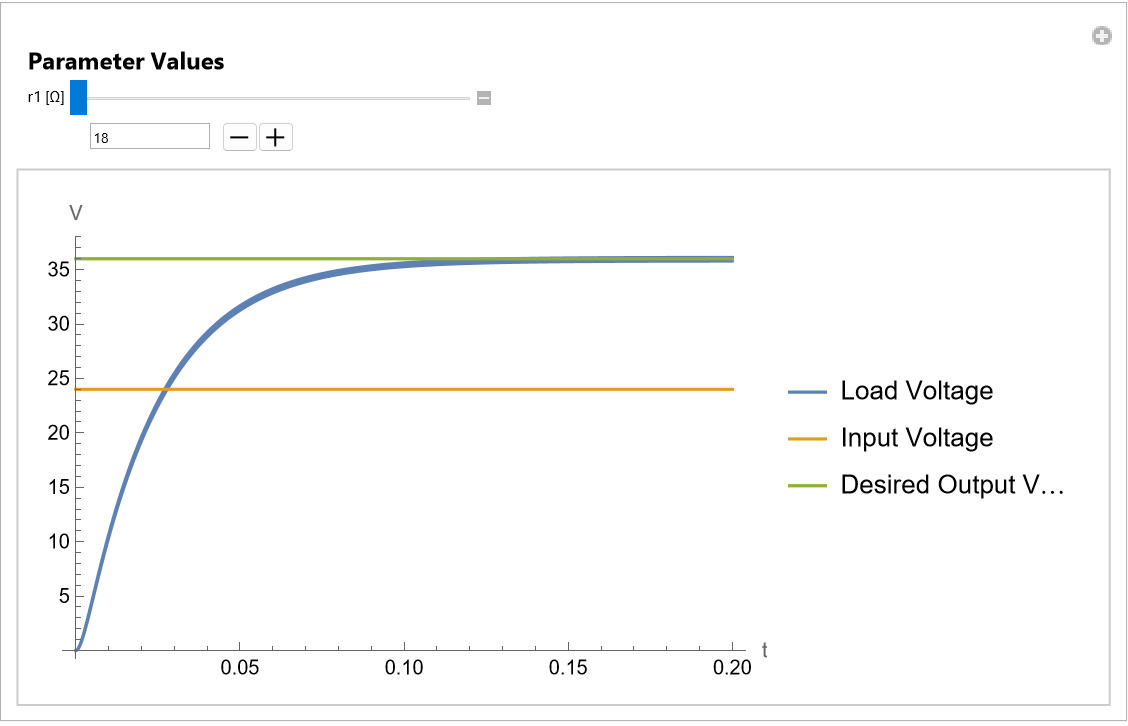 |
Control initial values in an AffineStateSpaceModel:
| In[4]:= | ![ResourceFunction["SystemModelManipulate"][ AffineStateSpaceModel[{{-(x1/10) - Cos[x2^2], Cos[x1]}, {{0}, {1}}, {x1}, {{0}}}, {x1, x2}, Automatic, {Automatic}, Automatic, SamplingPeriod -> None] ]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/3f45b36b9c25b814.png) |
| Out[4]= | 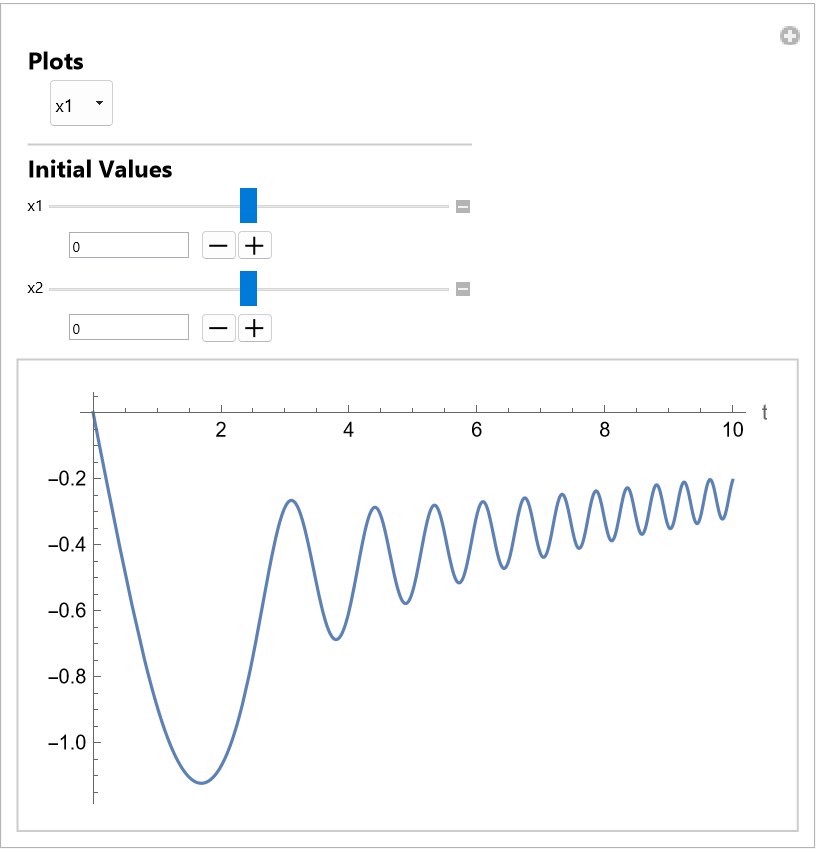 |
Control initial and parameter values in a NonlinearStateSpaceModel:
| In[5]:= | ![ResourceFunction["SystemModelManipulate"][
NonlinearStateSpaceModel[{{Cos[x] + 4 Sin[(1 + 10 a) x/2]}, {x + Sin[x]}}, {x}, {}, {Automatic}, Automatic, SamplingPeriod -> None]]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/54b8d25fec15632f.png) |
| Out[5]= | 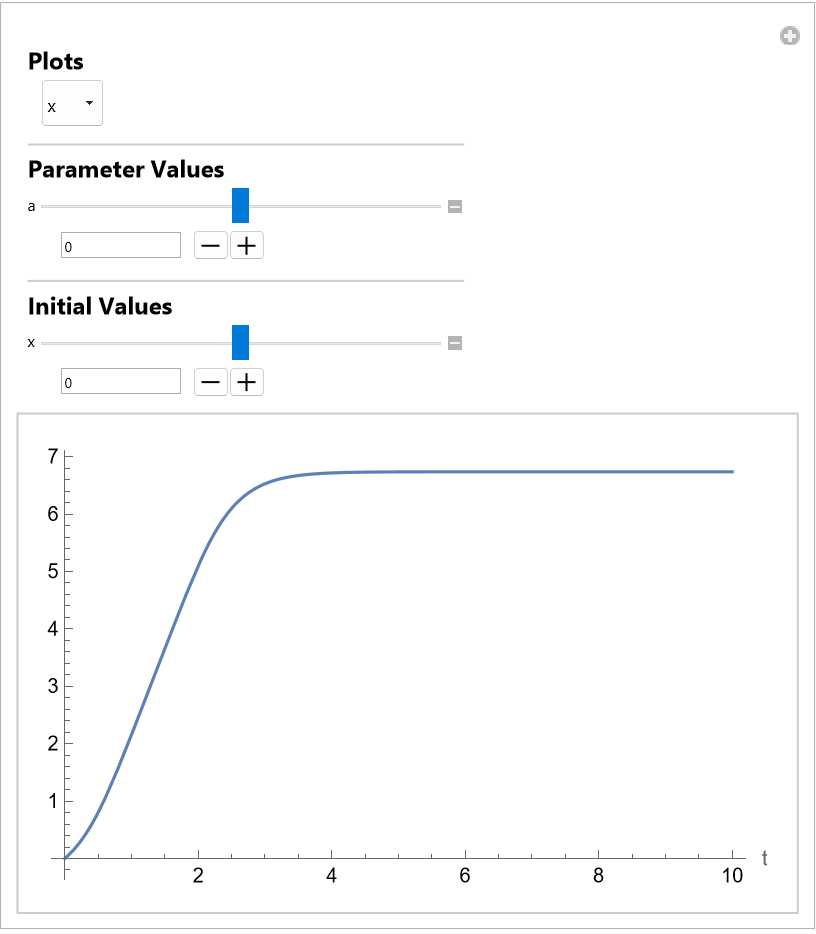 |
Control parameter and initial values in a StateSpaceModel with a given input:
| In[6]:= | ![ResourceFunction["SystemModelManipulate"][
StateSpaceModel[{{{0, 1}, {1/4 (-2 - 4 a), -(5/2) - a}}, {{0}, {1}}, {{1, -1}}, {{0}}},
SamplingPeriod ->None, SystemsModelLabels -> None], <|
"Inputs" -> {1 -> UnitStep}|>]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/265131afc113be0d.png) |
| Out[6]= | 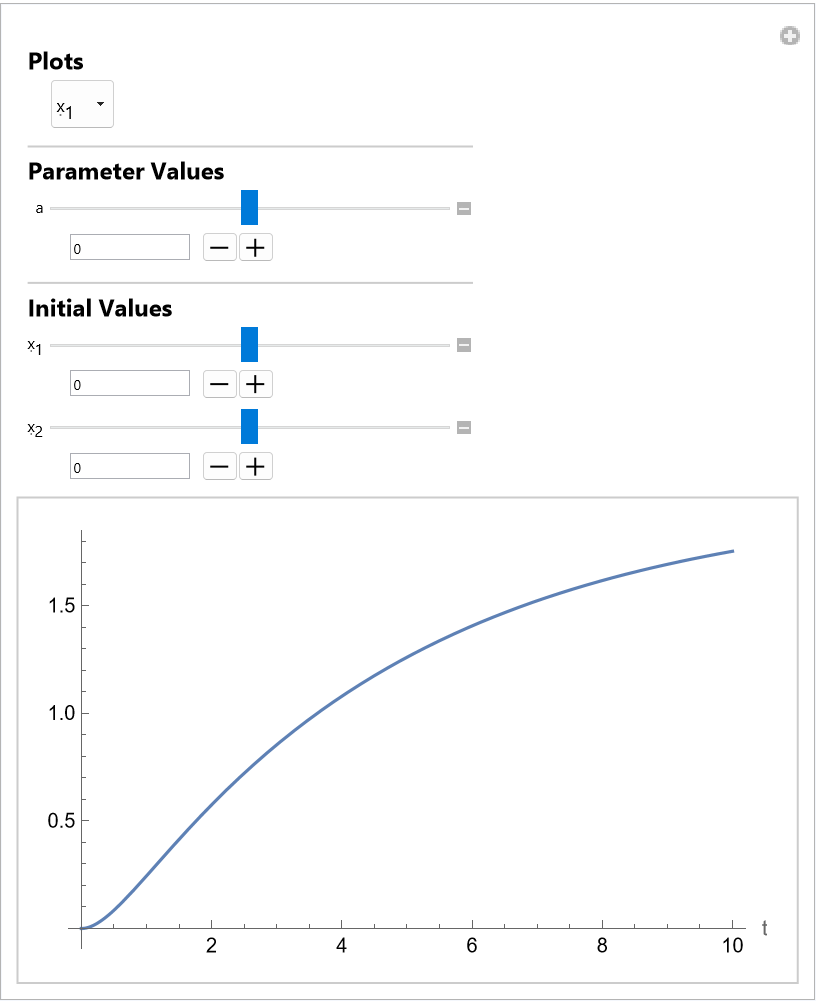 |
Control a parameter value in a TransferFunctionModel with a given input:
| In[7]:= | ![ResourceFunction["SystemModelManipulate"][
TransferFunctionModel[
Unevaluated[{{(s - 1)/(s^2 + (5/2 + a) s + 1/2 + a)}}], s, SamplingPeriod ->None, SystemsModelLabels -> None], <|
"Inputs" -> {1 -> Tanh}|>]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/75181a26a985d79b.png) |
| Out[7]= | 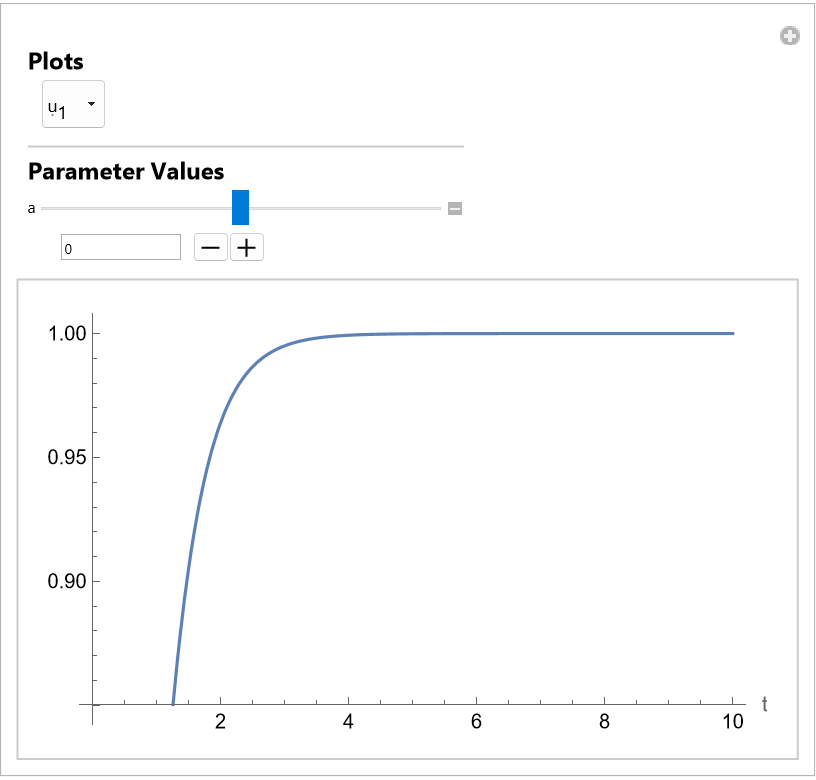 |
Control a parameter value in a DiscreteInputOutputModel with a given input:
| In[8]:= |
| Out[8]= |
| In[9]:= |
| Out[9]= | 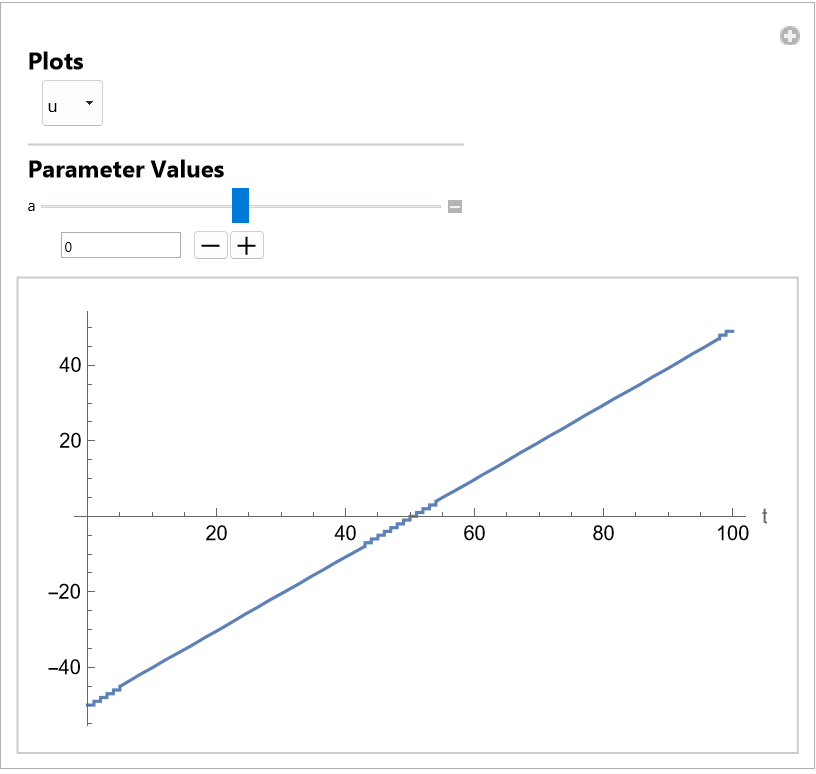 |
Reproduce control annotations for a SystemModel:
| In[10]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/ee24562f-d7e9-4952-8506-04e44cae8d82"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/5e5f1cf7f707c1b2.png) |
| Out[10]= | 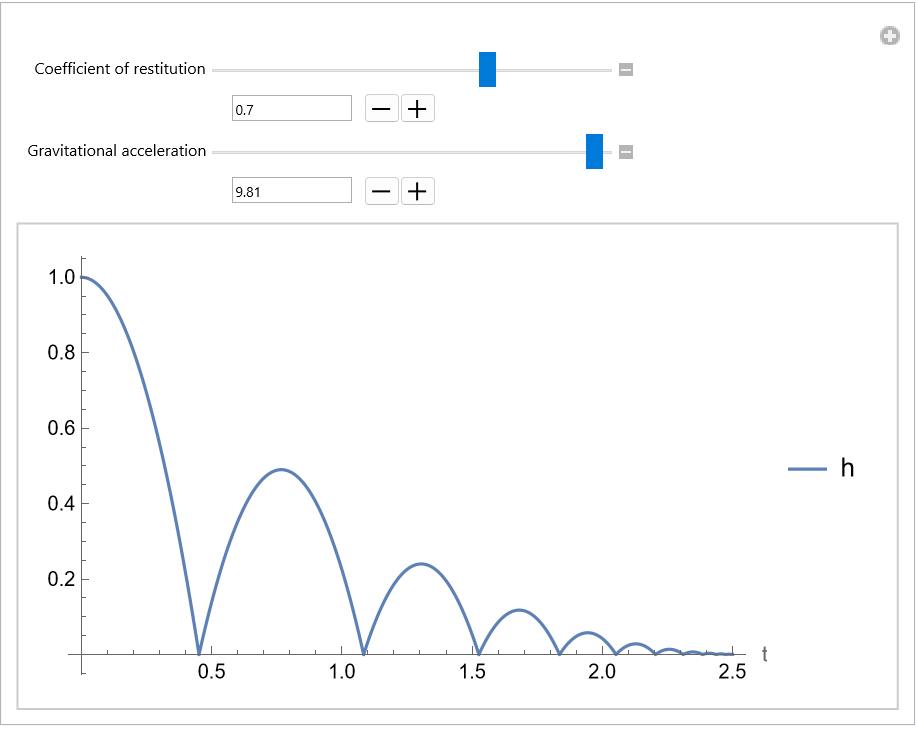 |
For a SystemModel all default plots are shown by default:
| In[11]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/528c7503-0df2-41d8-b5f4-e0aebea9634f"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/0ad22bd330e83481.png) |
| Out[11]= | 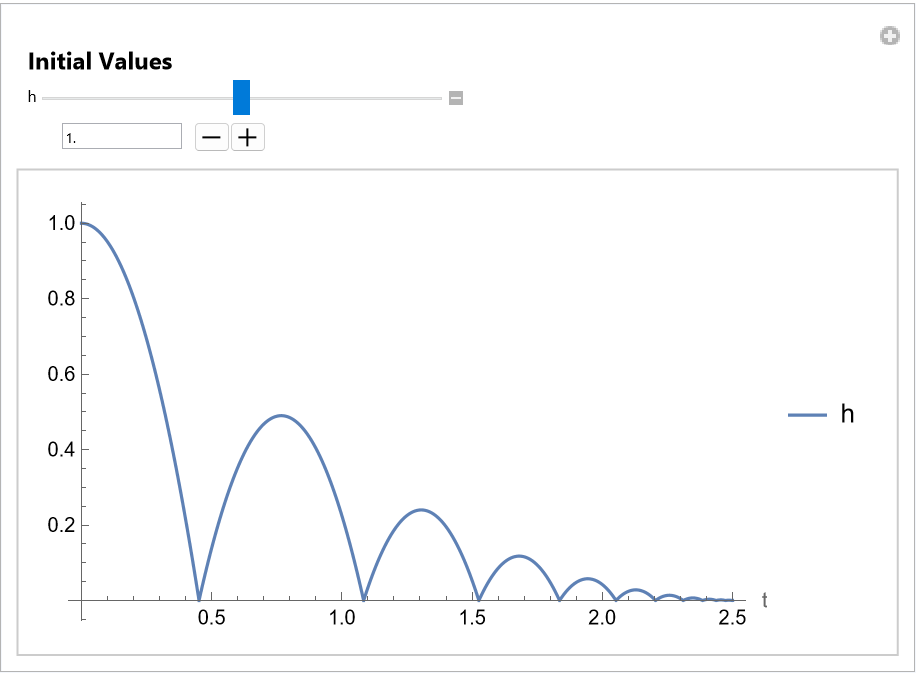 |
Manipulate all plots individually with a "Plots" control:
| In[12]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/16fb2da8-41e2-48cb-bddc-d9e64b31ff06"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/6e110202269ef5f0.png) |
| Out[12]= | 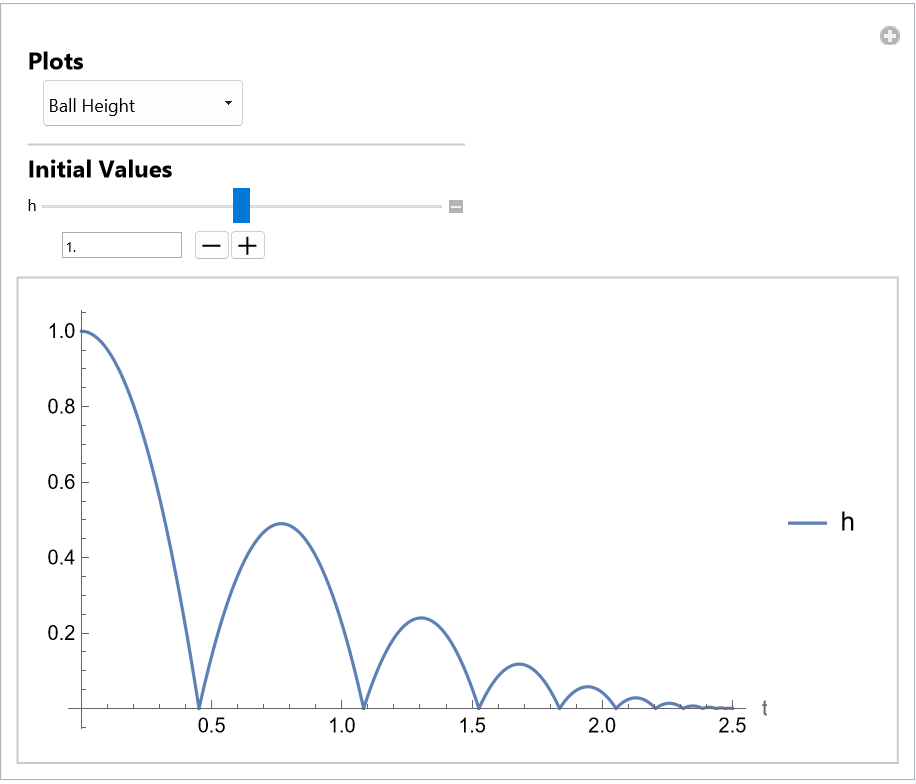 |
Select which plots to make available:
| In[13]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/3bc8c753-0ce6-4c08-84a3-cbb2744ecc51"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/25037f6878ed7d1d.png) |
| Out[13]= | 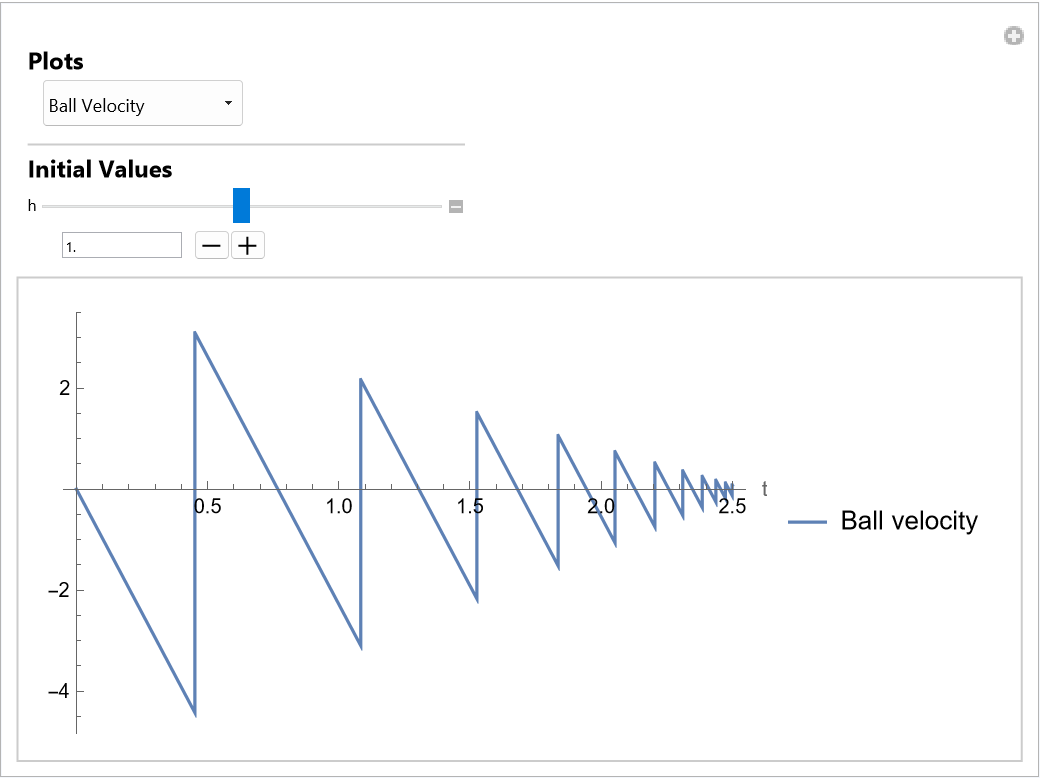 |
Use variables or list of variables to specify plots:
| In[14]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/d59945cd-9edd-4562-bb50-4f81bdb6b185"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/52c82a5b59dad13e.png) |
| Out[14]= | 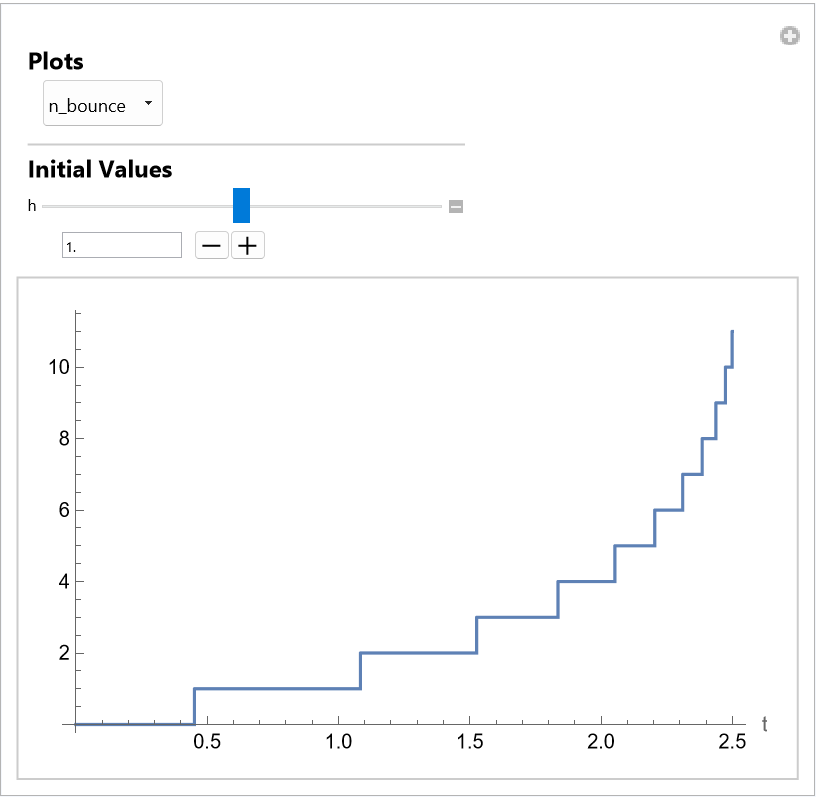 |
Specify a custom simulation interval:
| In[15]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/ce64f30e-862c-4ac9-9196-d7db8e662c2b"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/37b98dc459009a54.png) |
| Out[15]= | 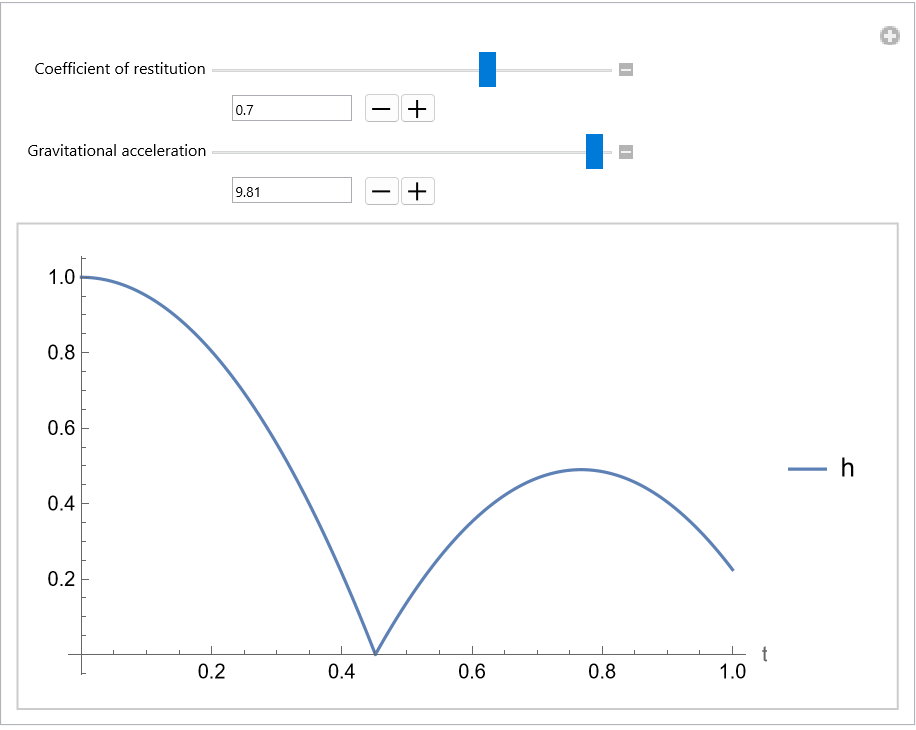 |
Pick minimum and maximum values for the control of a parameter value:
| In[16]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/f4a8ed15-176a-4dfd-8a94-1f9f225e541c"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/5af58448062508ac.png) |
| Out[16]= |  |
Pick minimum, maximum and jump values for the control of a parameter value:
| In[17]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/01ac37eb-77b3-4c9f-ac02-d4b2caa72af8"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/75f643a7307b6014.png) |
| Out[17]= |  |
Pick an initial value for the control of a parameter value:
| In[18]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/77b61f29-4c3c-438d-911f-bd268d59520b"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/4aee70aeda455652.png) |
| Out[18]= |  |
Pick a list of discrete values for the control of a parameter:
| In[19]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/98981c9a-4e58-4756-98ff-60a1d49ab238"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/793b69571ecfd8fd.png) |
| Out[19]= | 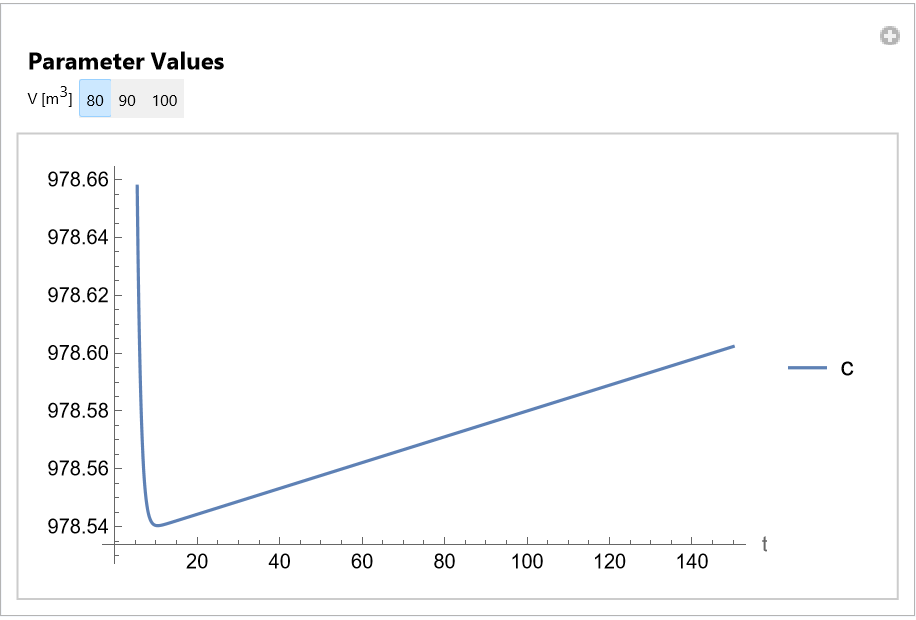 |
Pick a function for the control of a parameter:
| In[20]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/5fb88e0d-7987-4ade-a36b-4a9bdf030131"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/2c41d3bb2b13cb4b.png) |
| Out[20]= | 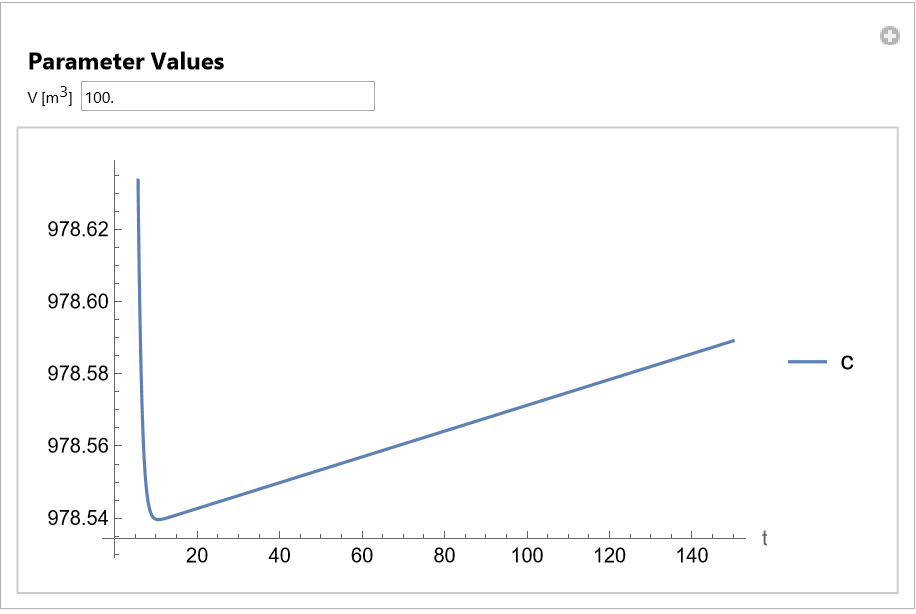 |
Pick a label for the control of an initial value:
| In[21]:= | ![ResourceFunction["SystemModelManipulate"][
AffineStateSpaceModel[{{-(x1/10) - Cos[x2^2], Cos[x1]}, {{0}, {1}}, {x1}, {{0}}}, {x1, x2}, Automatic, {Automatic}, Automatic, SamplingPeriod -> None] , {{x1, 5, Style["State 1", Bold]}, 0, 10}]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/59d42753dd360b83.png) |
| Out[21]= | 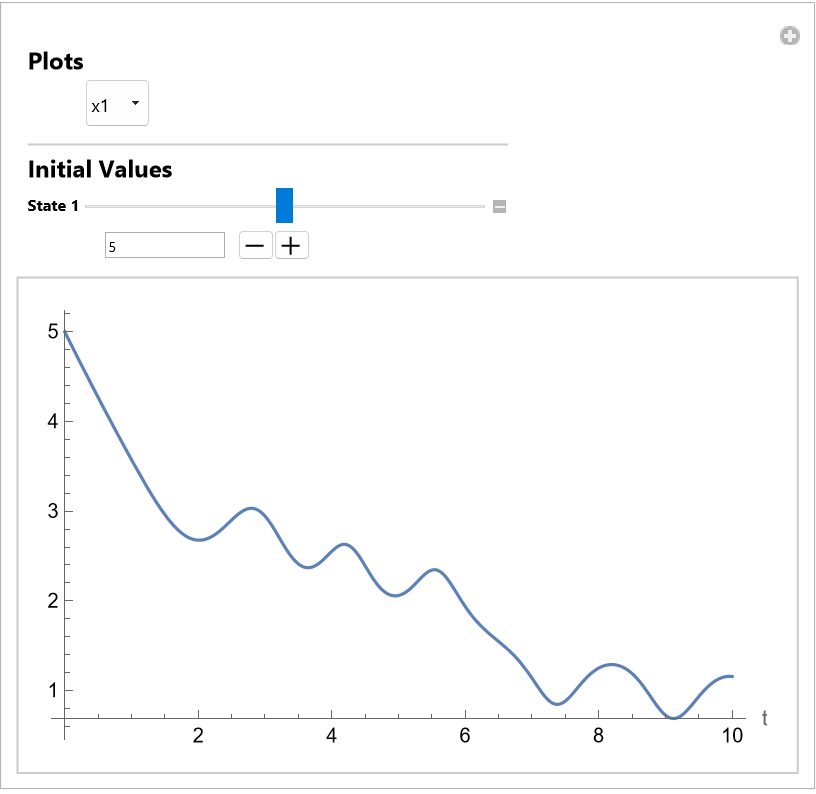 |
Pick a list of discrete values and their labels for the control of a parameter:
| In[22]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/19dcca5a-f19e-40dd-8114-216f90163a46"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/16ebf7cf3f13fc7d.png) |
| Out[22]= | 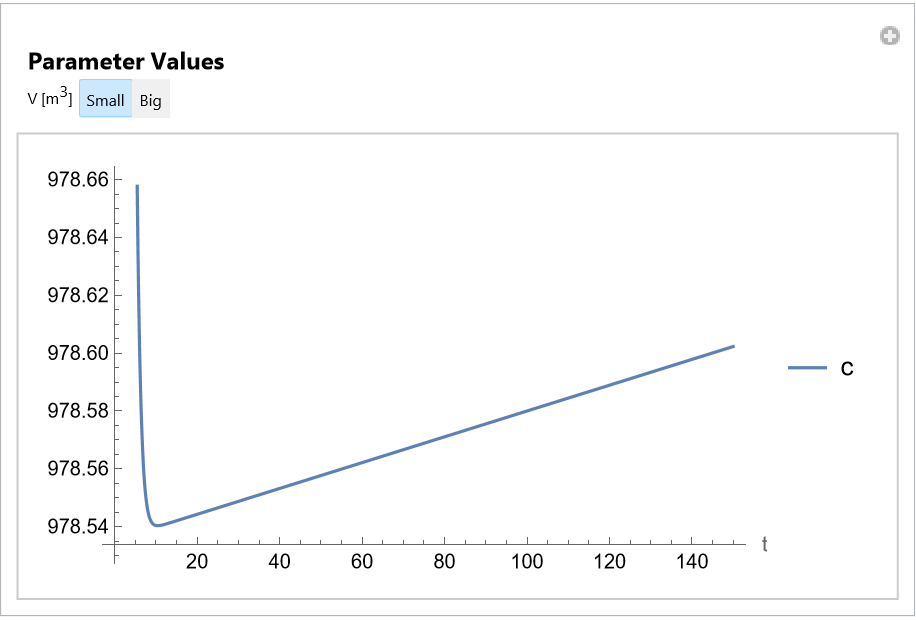 |
Controls for booleans and enumerations use PopupMenu as ControlType if they are not specified:
| In[23]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/2327ab32-35a7-4dc2-9be4-a80b6c0196e2"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/34da5b616f779765.png) |
| Out[23]= | 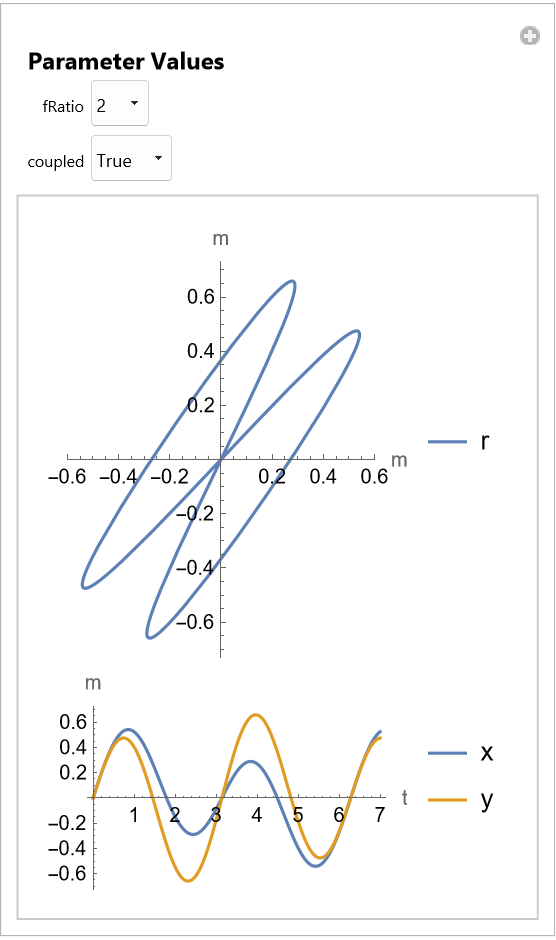 |
If provided in the model, the base unit is displayed next to the name of the variable or parameter and the description is shown with Tooltip:
| In[24]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/41d14a72-7bea-443f-b8aa-9c16ae7ae170"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/50fcc7f19dd86564.png) |
| Out[24]= | 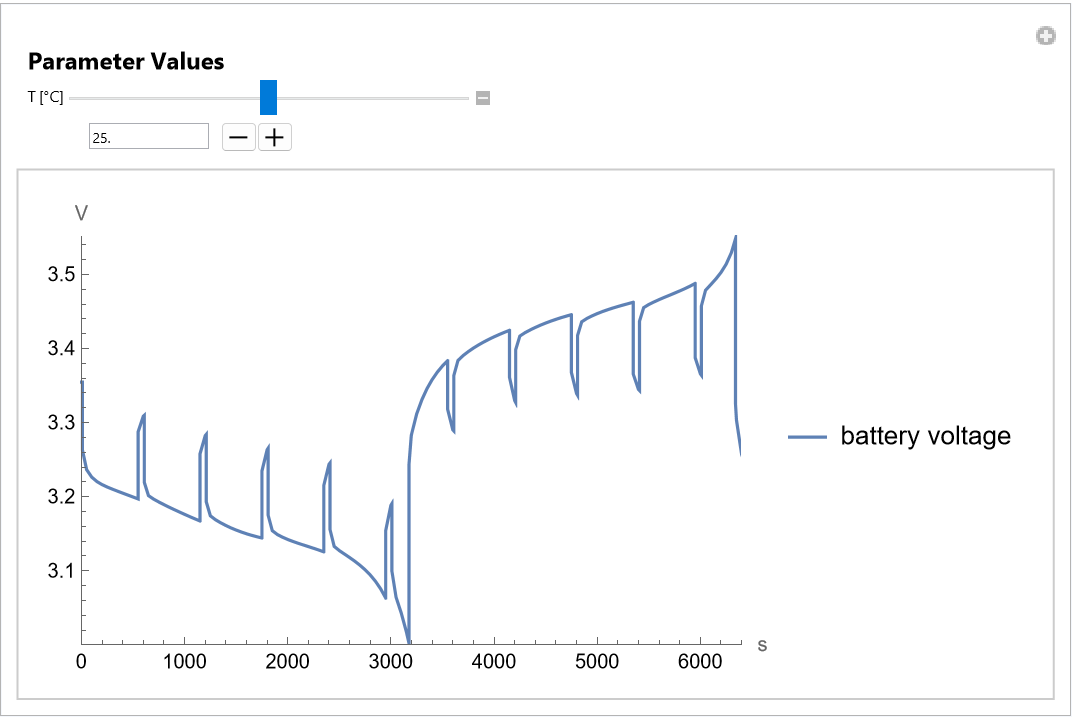 |
Set a fixed initial value:
| In[25]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/48c29538-5fa7-47a2-9e57-1801ba6868e7"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/2ca98567282211cb.png) |
| Out[25]= | 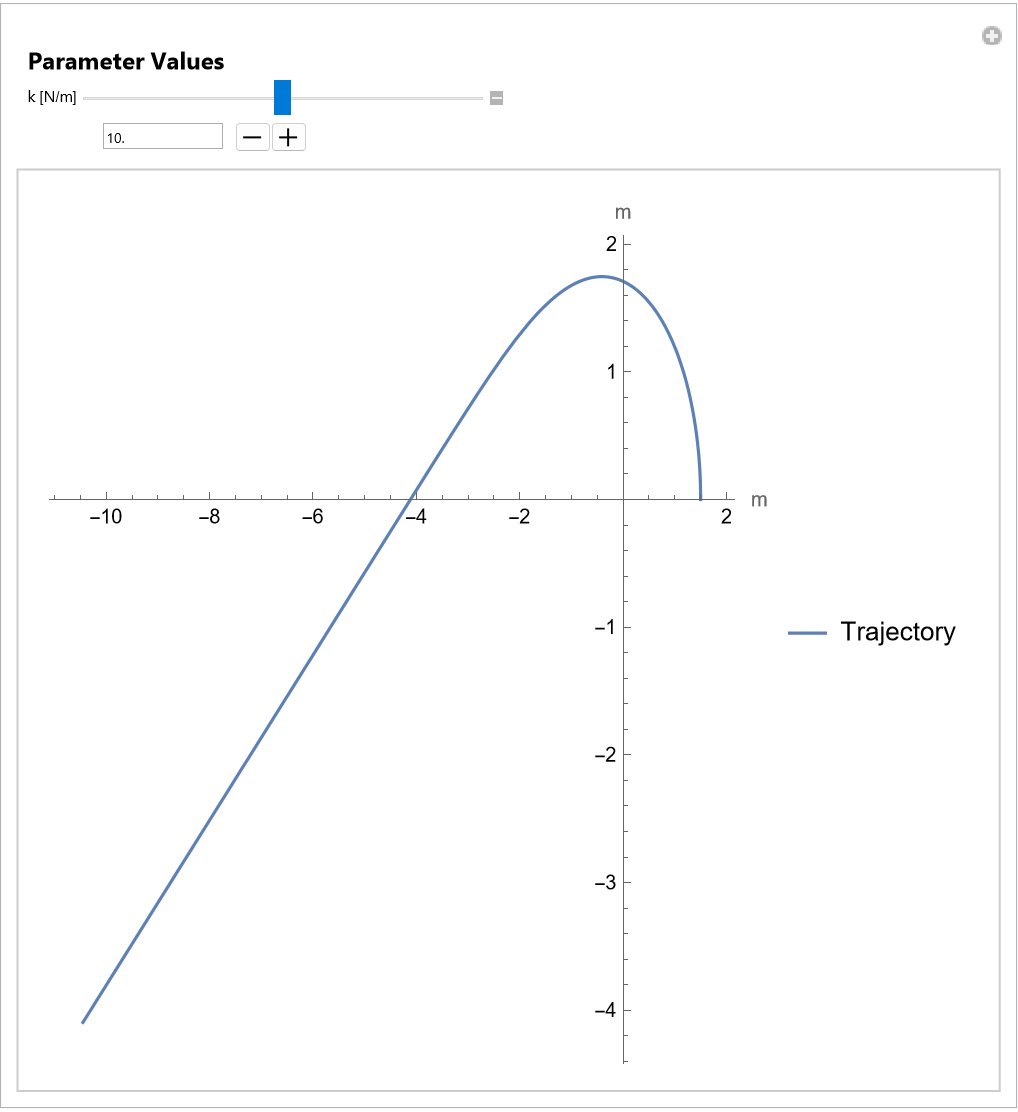 |
Set a fixed parameter value:
| In[26]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/015ed2a2-dc8a-4147-882e-ab6e8554a88d"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/430b36a9b2d48cb4.png) |
| Out[26]= | 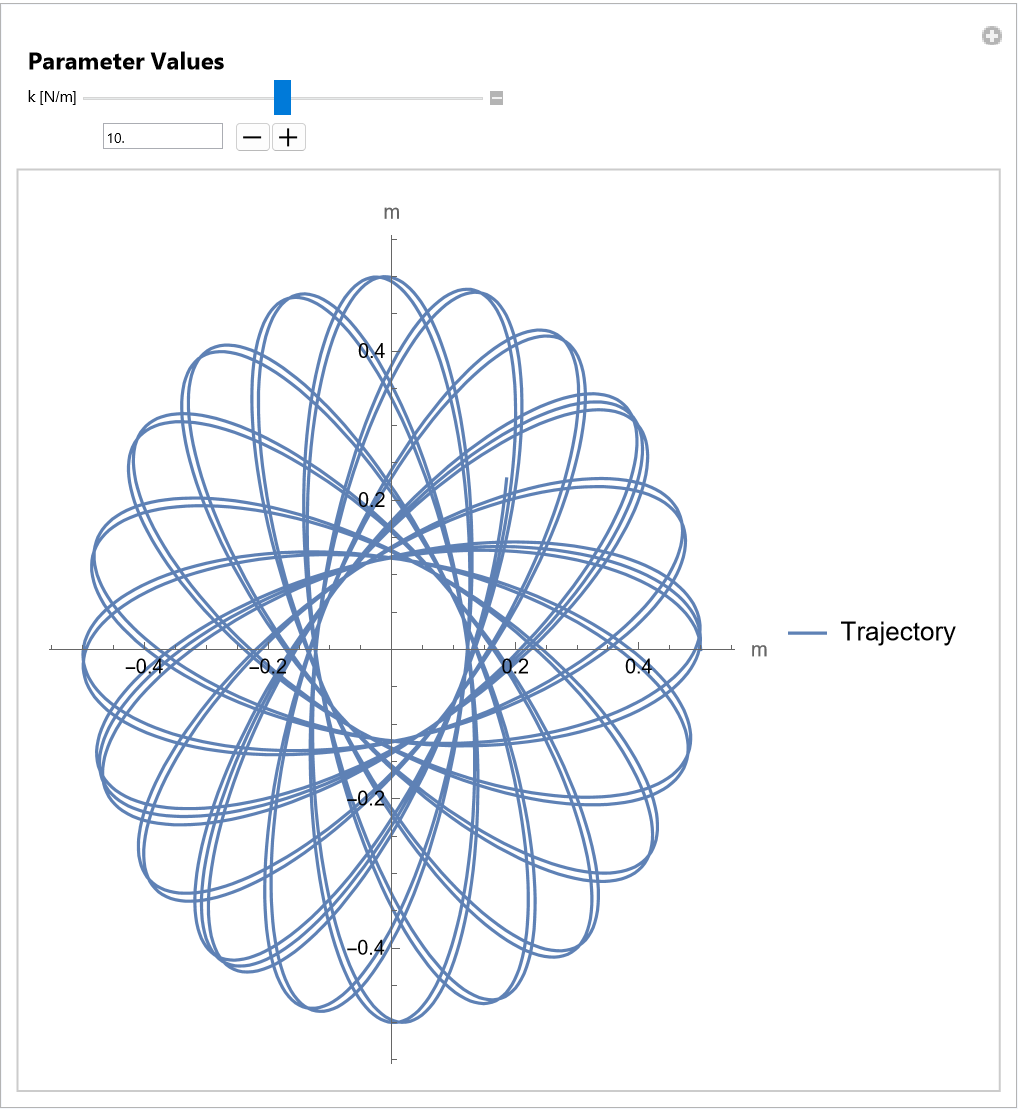 |
Set an input:
| In[27]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/ae3941dd-b646-446c-8bdc-ec93b3ab60d8"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/18edbb42e9d3a389.png) |
| Out[27]= | 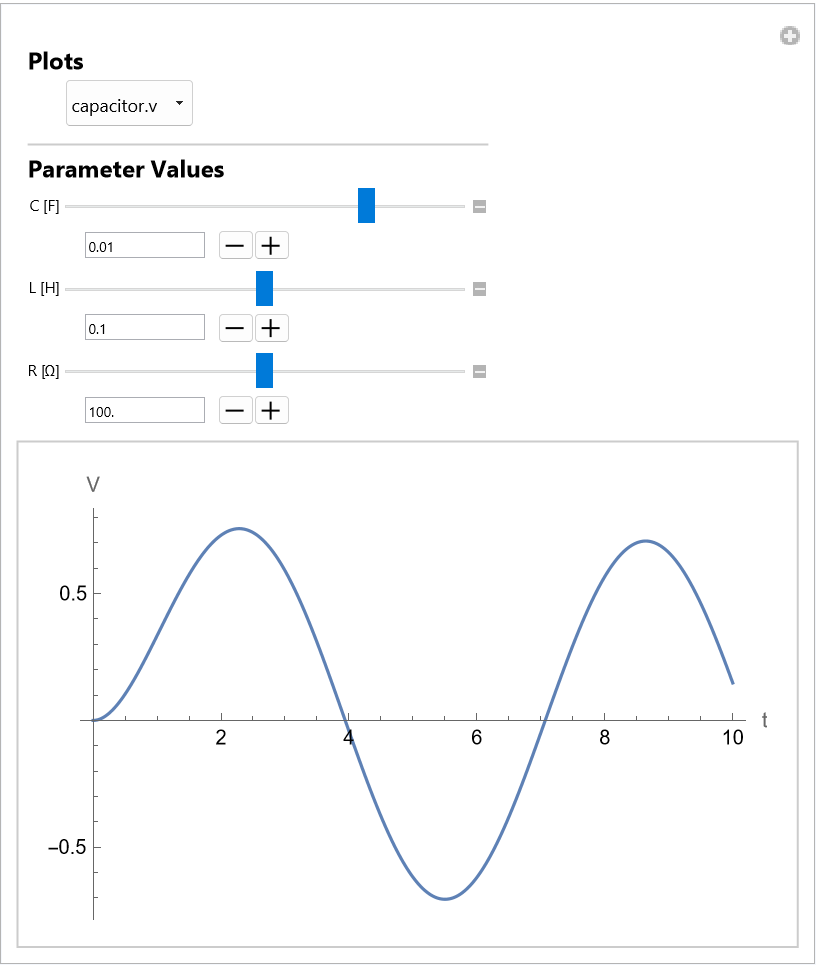 |
Real and integer values are displayed by default:
| In[28]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/9a037d05-2fe6-42fd-bbff-e18c255521a6"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1d70b4bdbfa37854.png) |
| Out[28]= | 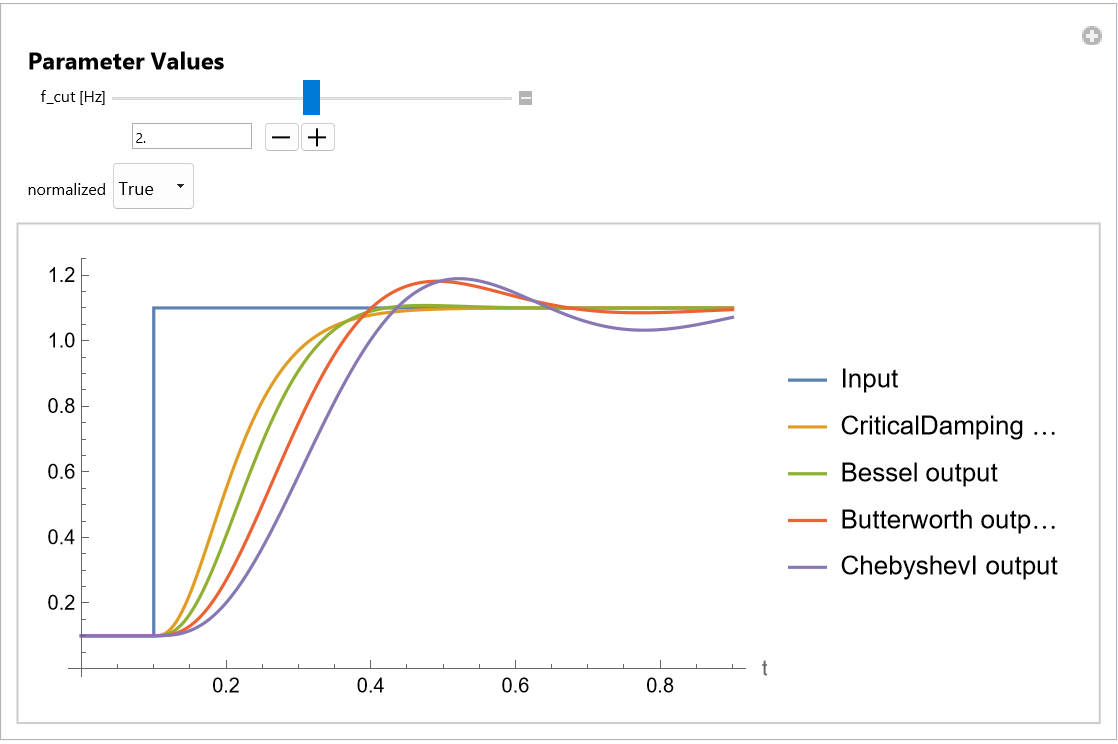 |
Remove displayed values:
| In[29]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/cab30afa-912f-43ad-9e29-4c27a2383bd3"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/4fc3821339af38fc.png) |
| Out[29]= | 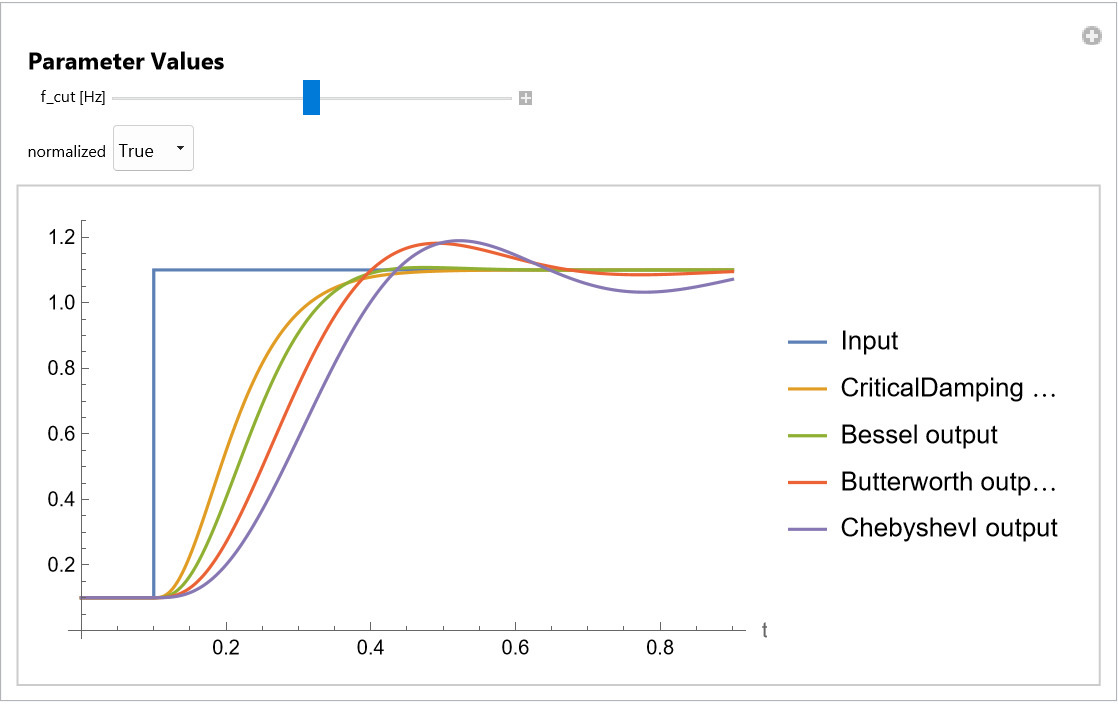 |
Study the trajectory of a classical charged particle under the effect of the Lorentz force:
| In[30]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/5911fc5e-b962-4701-a86d-8f1b5f3d03f3"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/1643eec4293932d9.png) |
| Out[30]= | 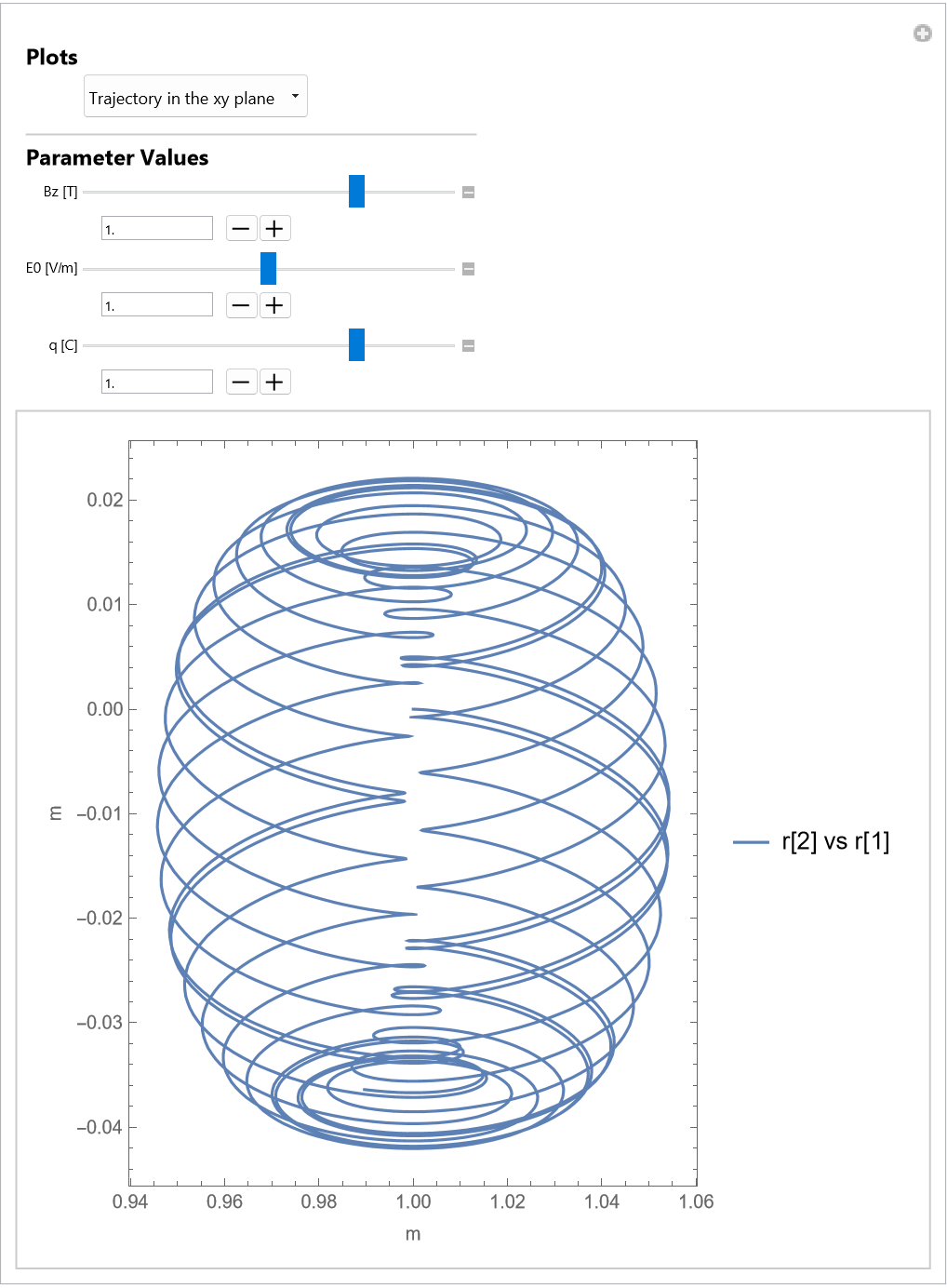 |
Visualize trajectories in the configuration space of a Duffing oscillator:
| In[31]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/3d9f07c0-eadc-4ac4-be68-b700d782a815"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/11ddc53dade700c8.png) |
| Out[31]= | 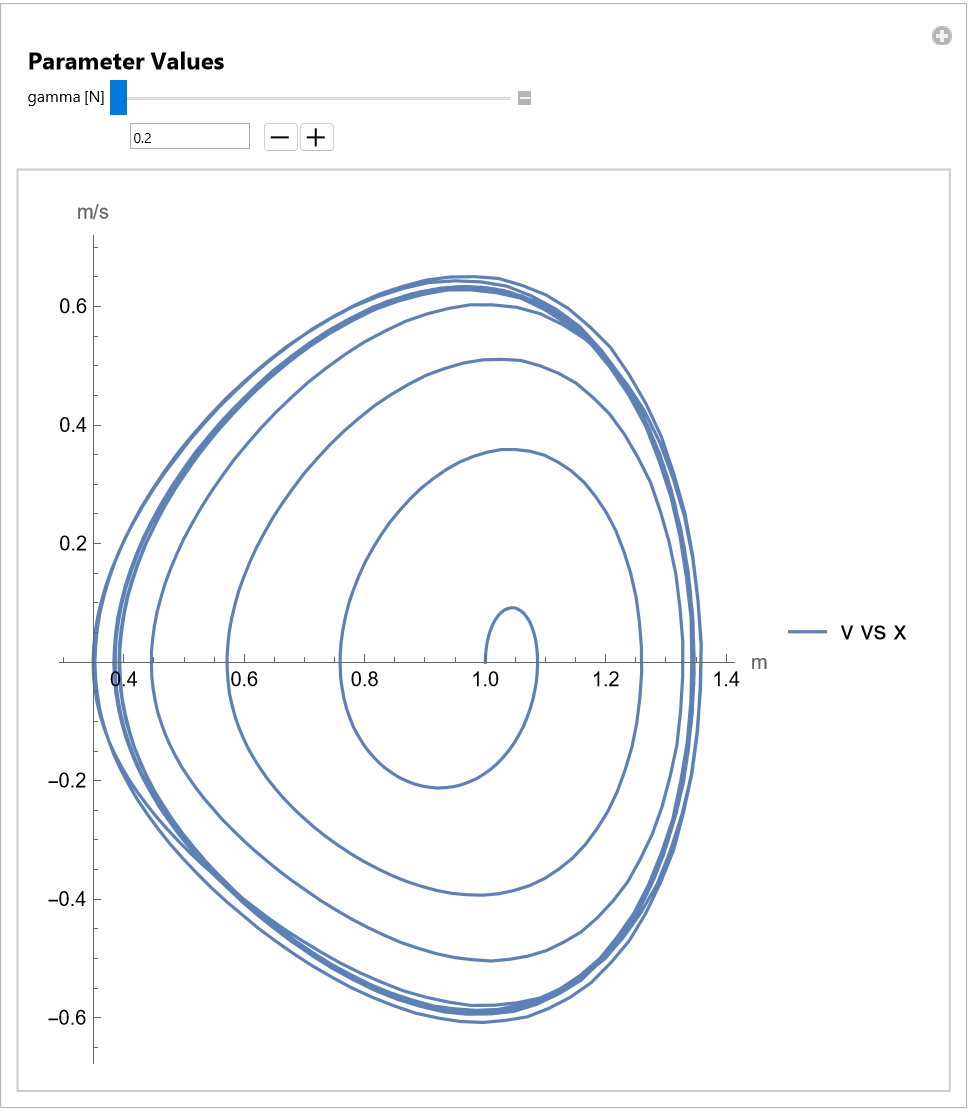 |
Visualize trajectories and mass loss of a rocket with exhaust velocity of constant magnitude:
| In[32]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/dc0ec1a6-becd-4e73-abf5-ccc11860882b"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/03a0491971d8013e.png) |
| Out[32]= | 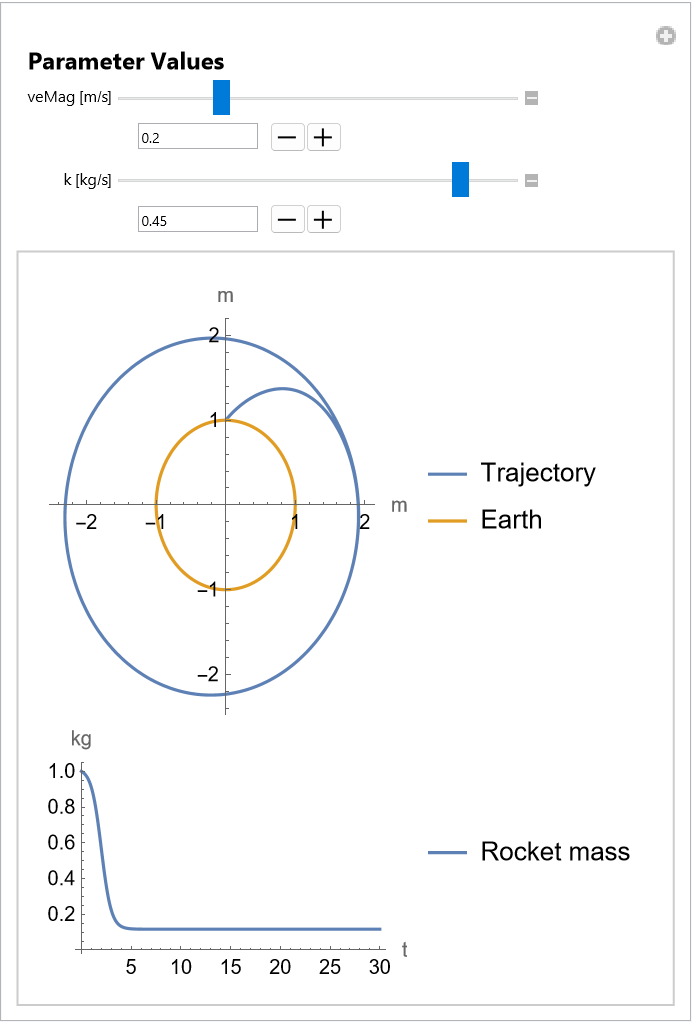 |
Study the model of a thumb-wheel potentiometer connected in a rheostat configuration:
| In[33]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/e38d868d-97c8-4eae-b70e-3bacbff33c5b"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/605b49994fad91ab.png) |
| Out[33]= | 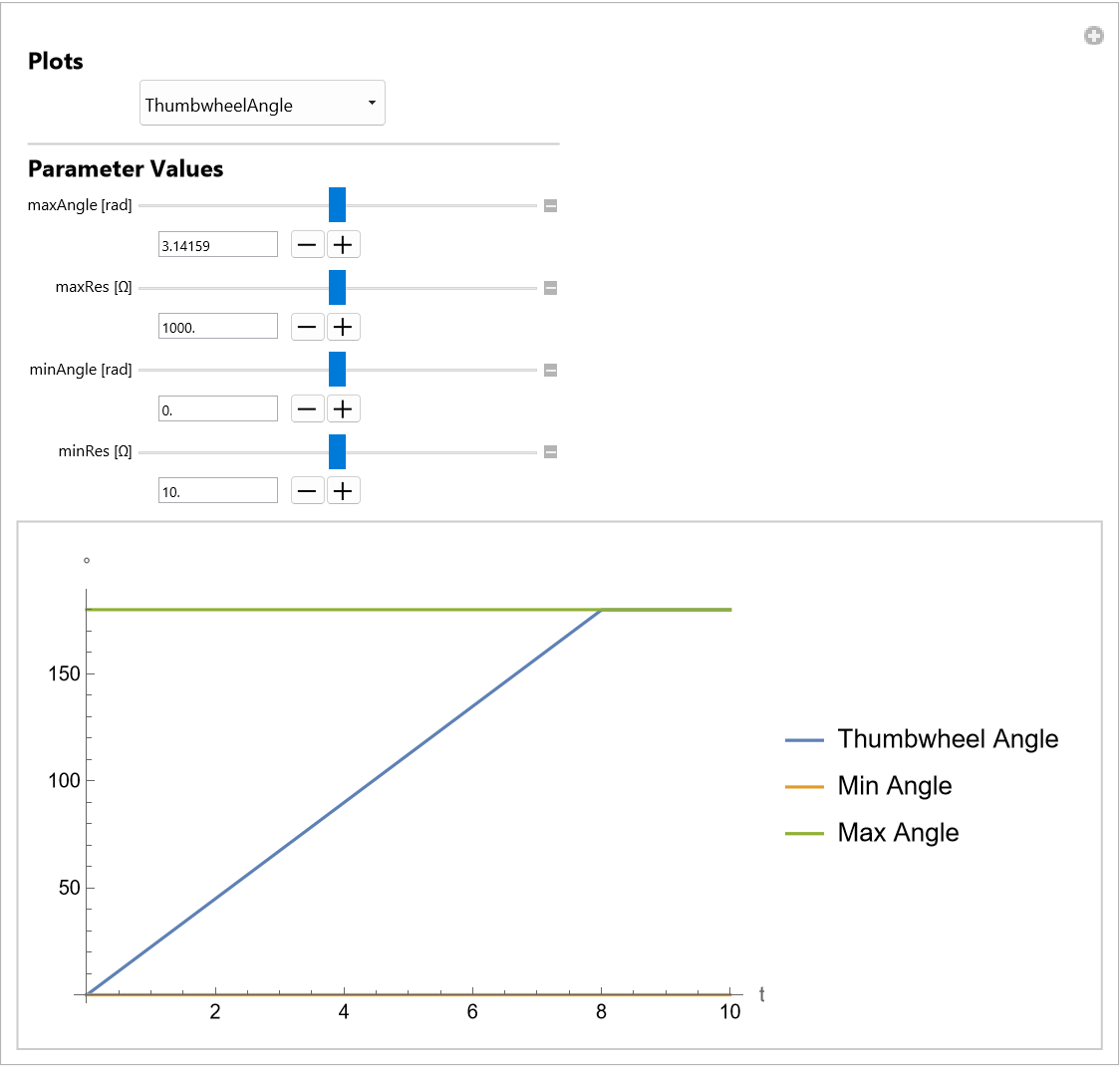 |
Use Setting on the output to access the displayed plots:
| In[34]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/13eef4b1-8b0d-48ed-a13a-3ac80e27fa77"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/4722fe40cb1ad491.png) |
| Out[34]= | 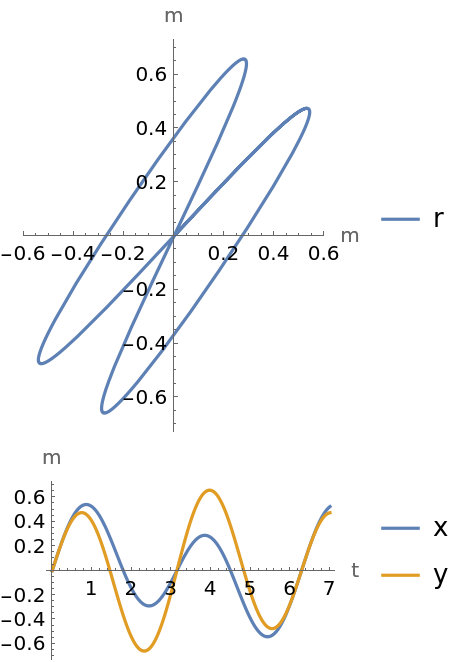 |
Observe the trajectories of 5 balls released inside a room, varying the size of the room using parameters:
| In[35]:= | ![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/f9bf2906-9956-4697-be3e-09feadd66024"]](https://www.wolframcloud.com/obj/resourcesystem/images/289/289ac5b0-105b-4326-81bd-072ba5cf5712/47c4bdb937e780df.png) |
| Out[35]= | 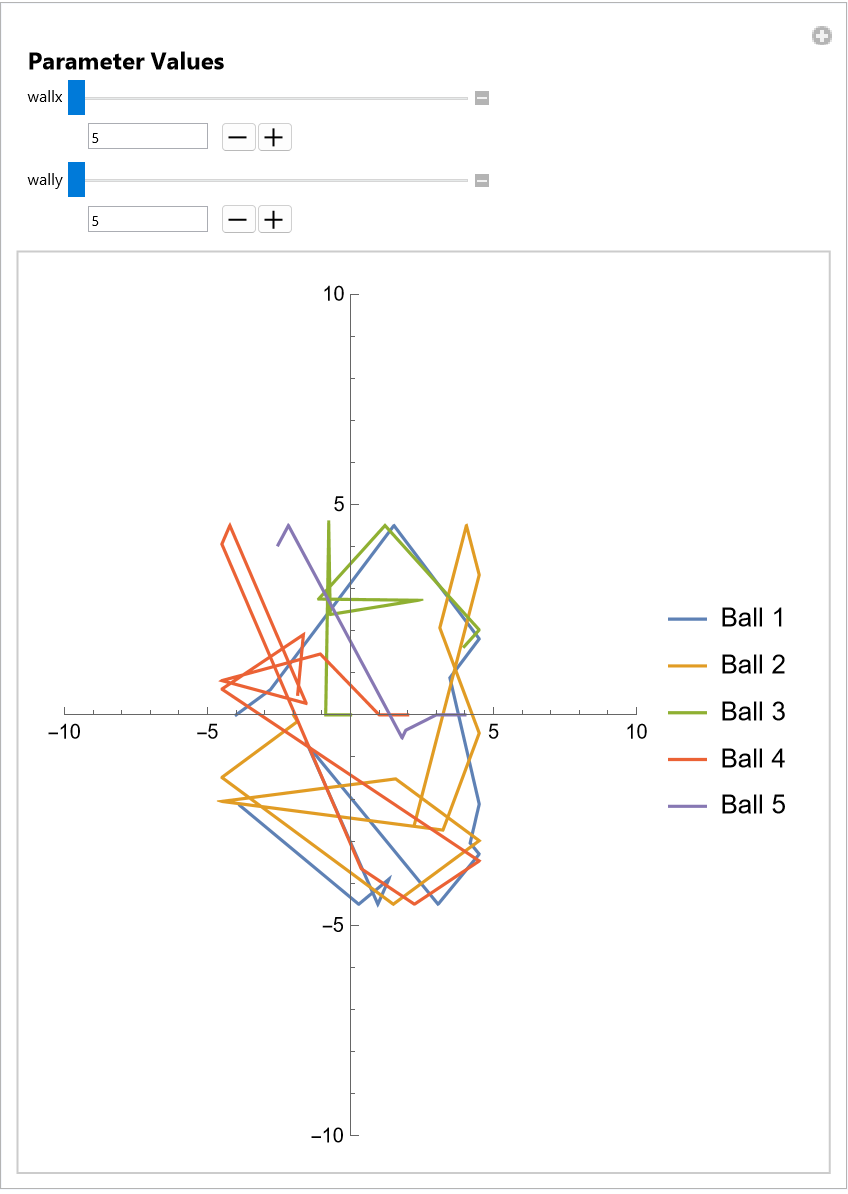 |
This work is licensed under a Creative Commons Attribution 4.0 International License