Retrieve a list of all dependent variables for a given expression
Contributed by:
E. Chan-López, Jaime Manuel Cabrera & Jorge Mauricio Paulin Fuentes
Examples
Basic Examples (1)
Use AllDependentVariables to get the expression that matches to be a mathematical solution:
Scope (2)
Use AllDependentVariables to get the expressions that match dependent variable:
Use AllDependentVariables with a list of complicated expressions:
Options (2)
Modulus (2)
Find dependent variables present after reducing coefficients modulo 2:
For polynomials, AllDependentVariables and Variables gives the same results:
Applications (3)
Use AllDependentVariables to define a simple function to compute the equations of motion for a given Hamiltonian:
Use HamiltonianEquations with the Hamiltonian for the spherical pendulum:
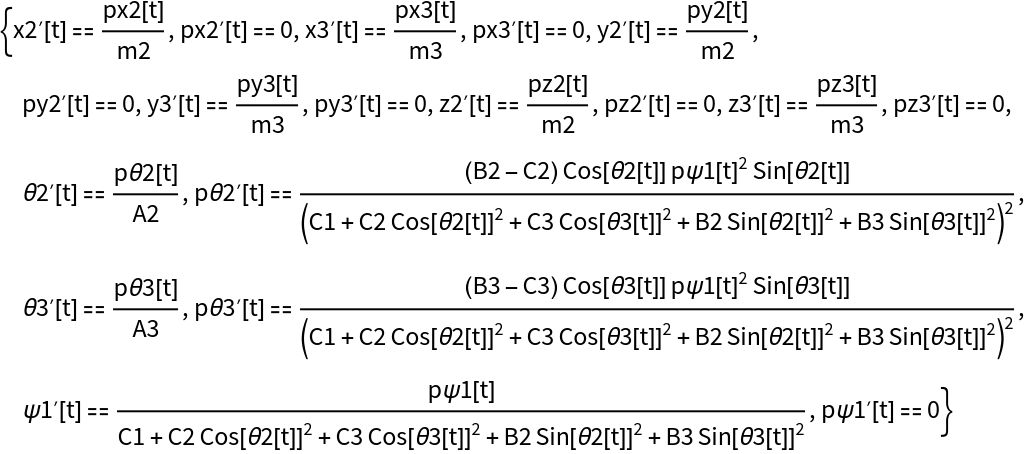
Use HamiltonianEquations with the Hamiltonian for the PUMA-Like Robot:
Possible Issues (1)
AllDependentVariables don't recognize curried functions as dependent variables:
Neat Examples (1)
AllDependentVariables threads composite functions to obtain the dependent variables:
Publisher
Ramón Eduardo Chan López
Version History
-
1.2.3
– 19 March 2025
-
1.2.2
– 20 September 2023
-
1.2.1
– 28 July 2023
-
1.2.0
– 21 July 2023
-
1.1.0
– 05 July 2023
-
1.0.0
– 21 April 2023
Related Resources
Author Notes
The current implementation has been enriched with valuable recommendations from the Wolfram Team.
![ResourceFunction["AllDependentVariables"][x[t] + 2 y[t] + 3 z[t], t, Modulus -> 2] === Variables[x[t] + 2 y[t] + 3 z[t], Modulus -> 2]](https://www.wolframcloud.com/obj/resourcesystem/images/488/488802d3-282c-4978-adeb-ce9c5b1b8eda/1-0-0/5d9b5895452cdaca.png)
![HamiltonianEquations[H_, time_Symbol] := Module[{sols, classcoordsprev, classcoords, momentaeqns, velseqns},
sols = ResourceFunction["AllDependentVariables"][H, time];
classcoordsprev = GatherBy[sols, FreeQ[Characters[ToString[Head[#]]], "p"] &];
classcoords = Which[Length[classcoordsprev] == 1, Join @@ List[classcoordsprev, Transpose[
Map[ToExpression@*StringJoin, Map[DeleteCases[#, "p"] &@*Characters@*ToString, Transpose@classcoordsprev]]]], Length[classcoordsprev] == 2 && Length[classcoordsprev[[1]]] === Length[classcoordsprev[[2]]], classcoordsprev, Length[classcoordsprev] == 2 && Length[classcoordsprev[[1]]] =!= Length[classcoordsprev[[2]]], Join @@ List[{classcoordsprev[[1]]}, {Transpose[
Map[ToExpression@*StringJoin, Map[DeleteCases[#, "p"] &@*Characters@*ToString, Transpose@classcoordsprev[[1]]]]]}]];
momentaeqns = Thread[D[classcoords[[1]], time] == Simplify[Map[-D[H, #] &, classcoords[[2]]]]];
velseqns = Thread[D[classcoords[[2]], time] == Simplify[Map[D[H, #] &, classcoords[[1]]]]];
Flatten[Transpose[List[velseqns, momentaeqns]]]]](https://www.wolframcloud.com/obj/resourcesystem/images/488/488802d3-282c-4978-adeb-ce9c5b1b8eda/1-0-0/67c0d8d5066b3d4e.png)
![H1 = -(1/2) g l^3 m^2 Cos[\[Theta][t]] + p\[Theta][t]^2/(2 l^2 m) + (
Csc[\[Theta][t]]^2 p\[Phi][t]^2)/(2 l^2 m);](https://www.wolframcloud.com/obj/resourcesystem/images/488/488802d3-282c-4978-adeb-ce9c5b1b8eda/1-0-0/5f5275618e061f8f.png)
![H2 = g (m2 z2 + m3 z3) + px2[t]^2/(2 m2) + px3[t]^2/(2 m3) + py2[t]^2/(2 m2) + py3[t]^2/(2 m3) + pz2[t]^2/(2 m2) + pz3[t]^2/(
2 m3) + p\[Theta]2[t]^2/(2 A2) + p\[Theta]3[t]^2/(2 A3) + p\[Psi]1[
t]^2/(2 (C1 + C2 Cos[\[Theta]2[t]]^2 + C3 Cos[\[Theta]3[t]]^2 + B2 Sin[\[Theta]2[t]]^2 + B3 Sin[\[Theta]3[t]]^2));](https://www.wolframcloud.com/obj/resourcesystem/images/488/488802d3-282c-4978-adeb-ce9c5b1b8eda/1-0-0/71b367fb5e3a4b73.png)
![Through[Map[ToExpression, Map[If[FreeQ[Characters[ToString[#]], "p"] === False, Subscript[#[[1]], Subscript[#[[2]], #[[3]]]], ResourceFunction["SymbolToSubscript"][StringJoin@#]] &, Map[Characters@*ToString@*Head, ResourceFunction["AllDependentVariables"][H2, t]]], {-1}][
Variables[
Level[ResourceFunction["AllDependentVariables"][H2, t], {-1}]][[
1]]]]](https://www.wolframcloud.com/obj/resourcesystem/images/488/488802d3-282c-4978-adeb-ce9c5b1b8eda/1-0-0/04f24735691fd0bd.png)
![L /. ResourceFunction["SolutionRulesToFunctions"][
Thread[ResourceFunction["AllDependentVariables"][L, t] -> Through[ReleaseHold@
HoldForm[ResourceFunction]["FormalizeSymbols"][
Head /@ ResourceFunction["AllDependentVariables"][L, t]][t]]]]](https://www.wolframcloud.com/obj/resourcesystem/images/488/488802d3-282c-4978-adeb-ce9c5b1b8eda/1-0-0/57360fcd0e7e859e.png)