Wolfram Function Repository
Instant-use add-on functions for the Wolfram Language
Function Repository Resource:
Given a simplex and point, find the cevians
ResourceFunction["Cevians"][simplex,point] computes the cevians for a given simplex and point. |
Find the generated cevians for a given triangle and point:
| In[1]:= | ![tri = {{0, 0}, {4, 0}, {0, 3}};
pt = {1, 1/2};
cev = ResourceFunction["Cevians"][tri, pt]](https://www.wolframcloud.com/obj/resourcesystem/images/c80/c804bf4c-0b4e-4470-b7d2-27319a858d38/7417e44d3d876aa4.png) |
| Out[3]= |
Show the cevians:
| In[4]:= | ![Graphics[{EdgeForm[Black], LightGray, Triangle[tri], Black, Line /@ Transpose[{tri, cev}], Green, Disk[#, .1] & /@ cev, Red, Disk[pt, .1]}]](https://www.wolframcloud.com/obj/resourcesystem/images/c80/c804bf4c-0b4e-4470-b7d2-27319a858d38/7aed5255d01a102c.png) |
| Out[4]= | 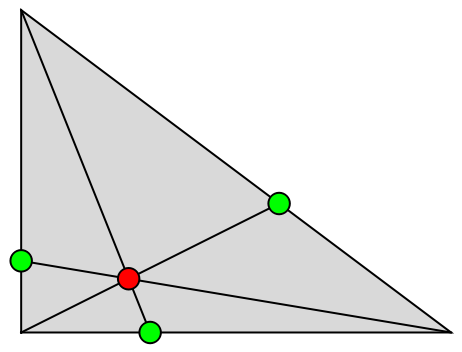 |
Verify Ceva's Theorem:
| In[5]:= | ![pointtocevian = EuclideanDistance[pt, #] & /@ cev;
vertextocevian = EuclideanDistance[#[[1]], #[[2]]] & /@ Transpose[{tri, cev}];
Total[pointtocevian/vertextocevian]](https://www.wolframcloud.com/obj/resourcesystem/images/c80/c804bf4c-0b4e-4470-b7d2-27319a858d38/4122681283846552.png) |
| Out[7]= |
Find the generated cevians for a given tetrahedron and point:
| In[8]:= | ![tet = {{0, 0, 0}, {4, 0, 0}, {0, 3, 0}, {0, 0, 5}};
pt = {1, 1, 1};
cev = ResourceFunction["Cevians"][tet, pt]](https://www.wolframcloud.com/obj/resourcesystem/images/c80/c804bf4c-0b4e-4470-b7d2-27319a858d38/0f1ee269a08958e4.png) |
| Out[10]= |
Show the cevians:
| In[11]:= | ![Graphics3D[{EdgeForm[Black], {LightGray, Opacity[.5], Tetrahedron[tet]}, Line /@ Transpose[{tet, cev}], Green, Sphere[#, .1] & /@ cev, Red, Sphere[pt, .1]}]](https://www.wolframcloud.com/obj/resourcesystem/images/c80/c804bf4c-0b4e-4470-b7d2-27319a858d38/7d957dc86d182ef8.png) |
| Out[11]= | 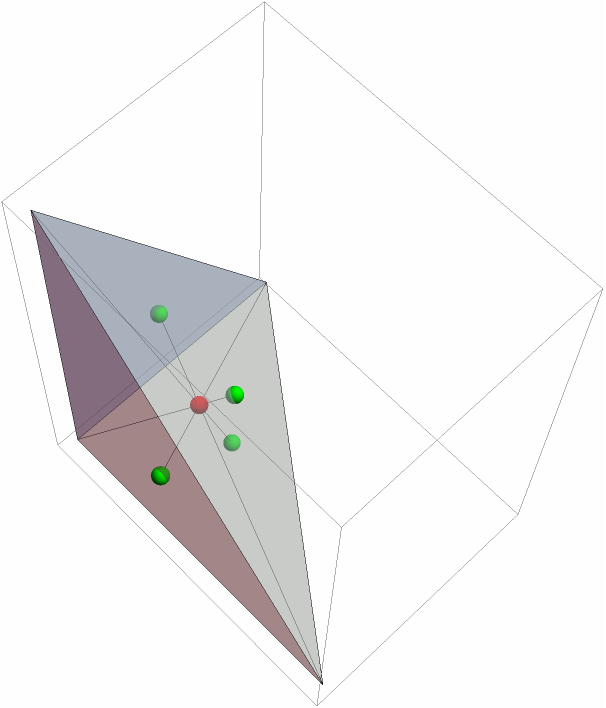 |
Verify Ceva's Theorem:
| In[12]:= | ![pointtocevian = EuclideanDistance[pt, #] & /@ cev;
vertextocevian = EuclideanDistance[#[[1]], #[[2]]] & /@ Transpose[{tet, cev}];
Total[pointtocevian/vertextocevian]](https://www.wolframcloud.com/obj/resourcesystem/images/c80/c804bf4c-0b4e-4470-b7d2-27319a858d38/77c5fc1a667cdceb.png) |
| Out[14]= |
Triangle and Point may be used:
| In[15]:= | ![tri = {{0, 0}, {4, 0}, {0, 3}};
pt = {1, 1/2};
cev = ResourceFunction["Cevians"][Triangle[tri], Point[pt]]](https://www.wolframcloud.com/obj/resourcesystem/images/c80/c804bf4c-0b4e-4470-b7d2-27319a858d38/37c50319648943ba.png) |
| Out[16]= |
Tetrahedron and Point may be used:
| In[17]:= | ![tet = {{0, 0, 0}, {4, 0, 0}, {0, 3, 0}, {0, 0, 5}};
pt = {1, 1, 1};
cev = ResourceFunction["Cevians"][Tetrahedron[tet], Point[pt]]](https://www.wolframcloud.com/obj/resourcesystem/images/c80/c804bf4c-0b4e-4470-b7d2-27319a858d38/11d0bf6e85d4998d.png) |
| Out[18]= |
Simplex and Point may be used:
| In[19]:= | ![tri = {{0, 0}, {4, 0}, {0, 3}};
pt = {1, 1/2};
cev = ResourceFunction["Cevians"][Simplex[tri], Point[pt]]](https://www.wolframcloud.com/obj/resourcesystem/images/c80/c804bf4c-0b4e-4470-b7d2-27319a858d38/513608a8c4d2434e.png) |
| Out[20]= |
Symbolic variables may be used in a triangle:
| In[21]:= | ![tri = {{0, 0}, {4, 0}, {0, 3}};
pt = {x, y};
cev = ResourceFunction["Cevians"][tri, pt]](https://www.wolframcloud.com/obj/resourcesystem/images/c80/c804bf4c-0b4e-4470-b7d2-27319a858d38/72d9c1c3762540db.png) |
| Out[23]= |
The cevians might not be on the line segments of the original triangle:
| In[24]:= | ![tri = {{0, 0}, {4, 0}, {0, 3}};
pt = {7, 5};
cev = ResourceFunction["Cevians"][tri, pt];
Graphics[{EdgeForm[{Black, Thick}], LightGray, Triangle[tri], InfiniteLine /@ Subsets[tri, {2}], Gray, InfiniteLine /@ Transpose[{tri, cev}], Thick, Black, Line /@ Transpose[{tri, cev}], Green, Disk[#, .2] & /@ cev, Red, Disk[pt, .2]}]](https://www.wolframcloud.com/obj/resourcesystem/images/c80/c804bf4c-0b4e-4470-b7d2-27319a858d38/4c1b2c1b637f7ca7.png) |
| Out[25]= | 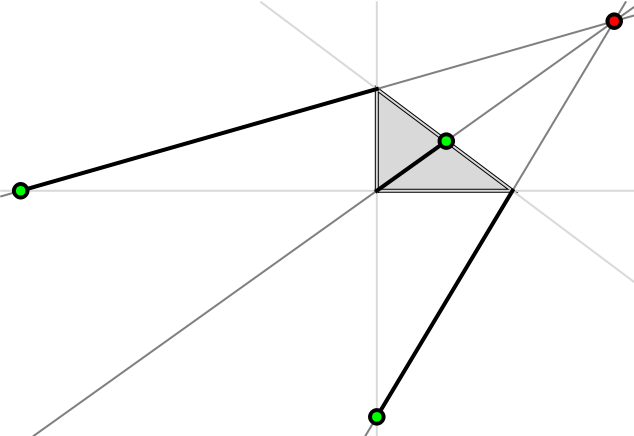 |
Symbolic variables currently do not work for a tetrahedron:
| In[26]:= | ![tet = {{0, 0, 0}, {4, 0, 0}, {0, 3, 0}, {0, 0, 5}};
pt = {x, y, z};
cev = ResourceFunction["Cevians"][tet, pt]](https://www.wolframcloud.com/obj/resourcesystem/images/c80/c804bf4c-0b4e-4470-b7d2-27319a858d38/03fe1dd4cb1798ab.png) |
| Out[28]= |  |
Calculate the Gergonne point and find the cevians:
| In[29]:= | ![tri = {{1, 2}, {2, -1}, {-3, 0}};
ge = First@ResourceFunction["GergonnePoint"][tri];
cev = RootReduce[ResourceFunction["Cevians"][tri, ge]]](https://www.wolframcloud.com/obj/resourcesystem/images/c80/c804bf4c-0b4e-4470-b7d2-27319a858d38/34348b607d32a481.png) |
| Out[31]= |
Show the cevians and the incircle:
| In[32]:= | ![Graphics[{EdgeForm[Black], LightGray, Triangle[tri], Black, Line /@ Transpose[{tri, cev}], Green, Disk[#, .1] & /@ cev, Red, Disk[ge, .1], Blue, Insphere[tri]}]](https://www.wolframcloud.com/obj/resourcesystem/images/c80/c804bf4c-0b4e-4470-b7d2-27319a858d38/0f4beab499fd4dbf.png) |
| Out[32]= | 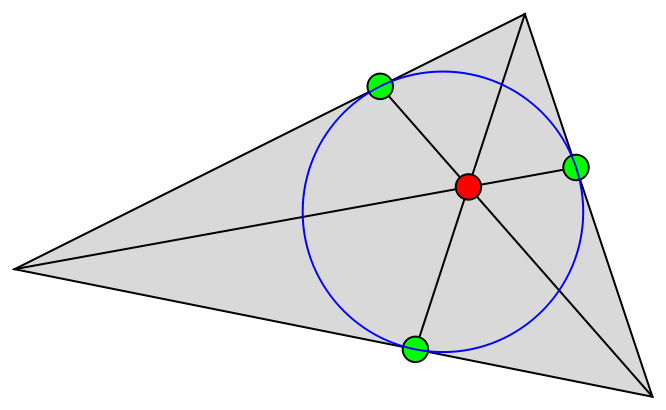 |
Compute some values for a tetrahedron:
| In[33]:= | ![tet = {{0, 0, 0}, {14, 0, 0}, {145/28, Sqrt[17391]/28, 0}, {145/28, 35815/(28 Sqrt[17391]), 325 Sqrt[83/17391]}};
monge = RootReduce[ResourceFunction["Monge"][tet]][[1]];
cev = RootReduce[ResourceFunction["Cevians"][tet, monge]];
edgelengths = RootReduce[EuclideanDistance @@ # & /@ Subsets[tet, {2}]]](https://www.wolframcloud.com/obj/resourcesystem/images/c80/c804bf4c-0b4e-4470-b7d2-27319a858d38/02cfa52dbc45631e.png) |
| Out[34]= |
Opposite edges of the tetrahedron have the same square sum, making it orthocentric:
| In[35]:= |
| Out[35]= |
The cevians of the Monge point are the altitudes of the tetrahedron:
| In[36]:= | ![Graphics3D[{Thick, {LightGray, Opacity[.2], InfinitePlane /@ Subsets[tet, {3}]}, Line /@ Transpose[{tet, cev}],
Gray, Line /@ Subsets[tet, {2}], Green, Sphere[#, .2] & /@ cev, Blue, Sphere[#, .2] & /@ tet, Red, Sphere[monge, .2]}, SphericalRegion -> True, Boxed -> False]](https://www.wolframcloud.com/obj/resourcesystem/images/c80/c804bf4c-0b4e-4470-b7d2-27319a858d38/14cdd7d187e9c03c.png) |
| Out[36]= | 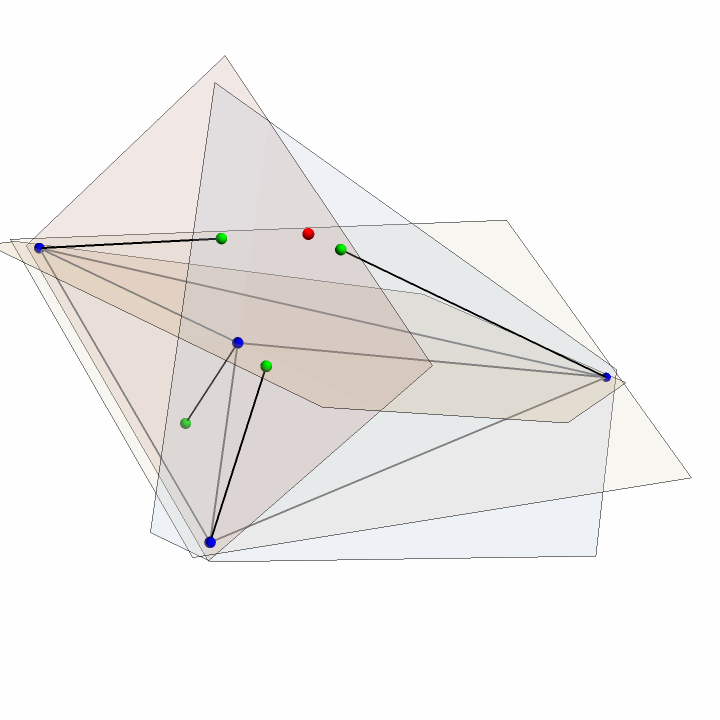 |
Wolfram Language 13.0 (December 2021) or above
This work is licensed under a Creative Commons Attribution 4.0 International License