Details
The Steiner inellipse of a triangle is an ellipse inscribed in a triangle with contact points at the midpoints, s=t=1/2. A general inellipse can have different contact points.
The affine location s of the contact point on p1p2 is s·(p2-p1)+p1 and t on p1p3 is t·(p3-p1)+p1.
The following properties are supported:
| "Ellipsoid" | Ellipsoid representing the inellipse |
| "Parametric" | parametric equation for the inellipse as a pure function |
| "Implicit" | implicit Cartesian equation for the inellipse as a pure function |
| "All" | returns addtional entries to ResourceFunction["EllipseProperties"] |
The additional entries included in the full property list include:
| "ContactPoints" | three contact points on the reference triangle |
| "ConjugateHalfDiameterVectors" | two vectors construct the "Parametric" form |
| "BrianchonPoint" | the concurrence of three lines joining triangle vertices and contacts |
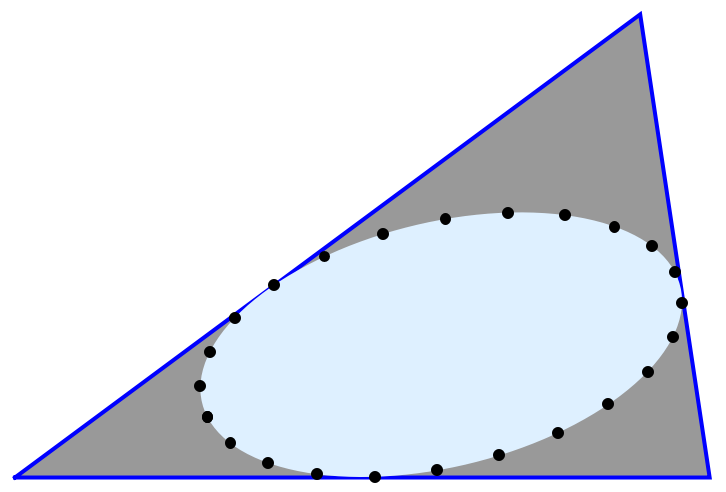
Due to the concurrency at the
Brianchon point, by
Ceva's theorem,
, where
s,t and
r are the affine location of the three contact points on each side. See "Properties and Relations" for choice of convention following the definition of argument in this function.
ResourceFunction["Inellipse"][{p1,p2,p3},s,t,prop] is equivalent to ResourceFunction["Inellipse"][Triangle[{p1,p2,p3}],s,t,prop]
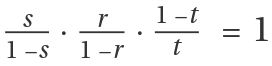
![Graphics[{
{Opacity[0.4], EdgeForm[{Thick, Blue}], Triangle[triVtx]},
{LightBlue, iep},
{Black, PointSize[0.02], Point[Mean[#]] & /@ Subsets[triVtx, {2}]}
}]](https://www.wolframcloud.com/obj/resourcesystem/images/01c/01cfaf84-153d-492f-acc3-e2534a16eb3b/7765e7b5c491102a.png)
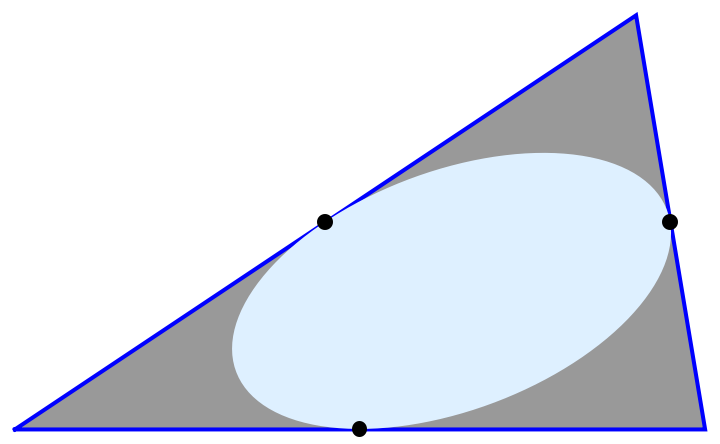
![iep = ResourceFunction["Inellipse"][triVtx, 0.5, 0.4];
iepFunc = ResourceFunction["Inellipse"][triVtx, 0.5, 0.4, "Parametric"]](https://www.wolframcloud.com/obj/resourcesystem/images/01c/01cfaf84-153d-492f-acc3-e2534a16eb3b/3c64e05207f40785.png)
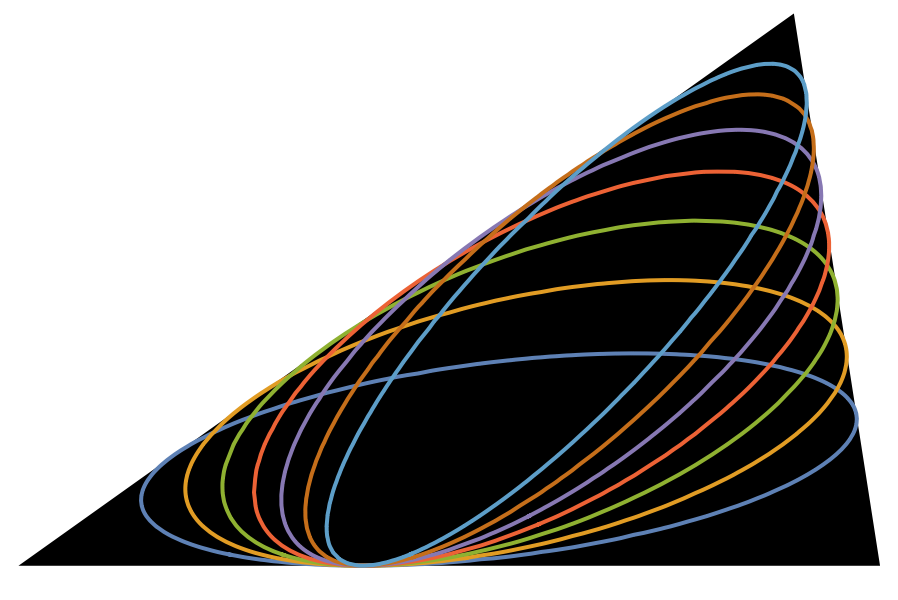
![pts = Point@Map[iepFunc, Subdivide[-Pi, Pi, 24]];
Graphics[{
{Opacity[0.4], EdgeForm[{Thick, Blue}], Triangle[triVtx]},
{LightBlue, iep},
{Black, PointSize[0.015], pts}
}]](https://www.wolframcloud.com/obj/resourcesystem/images/01c/01cfaf84-153d-492f-acc3-e2534a16eb3b/675fd4dd5db56022.png)
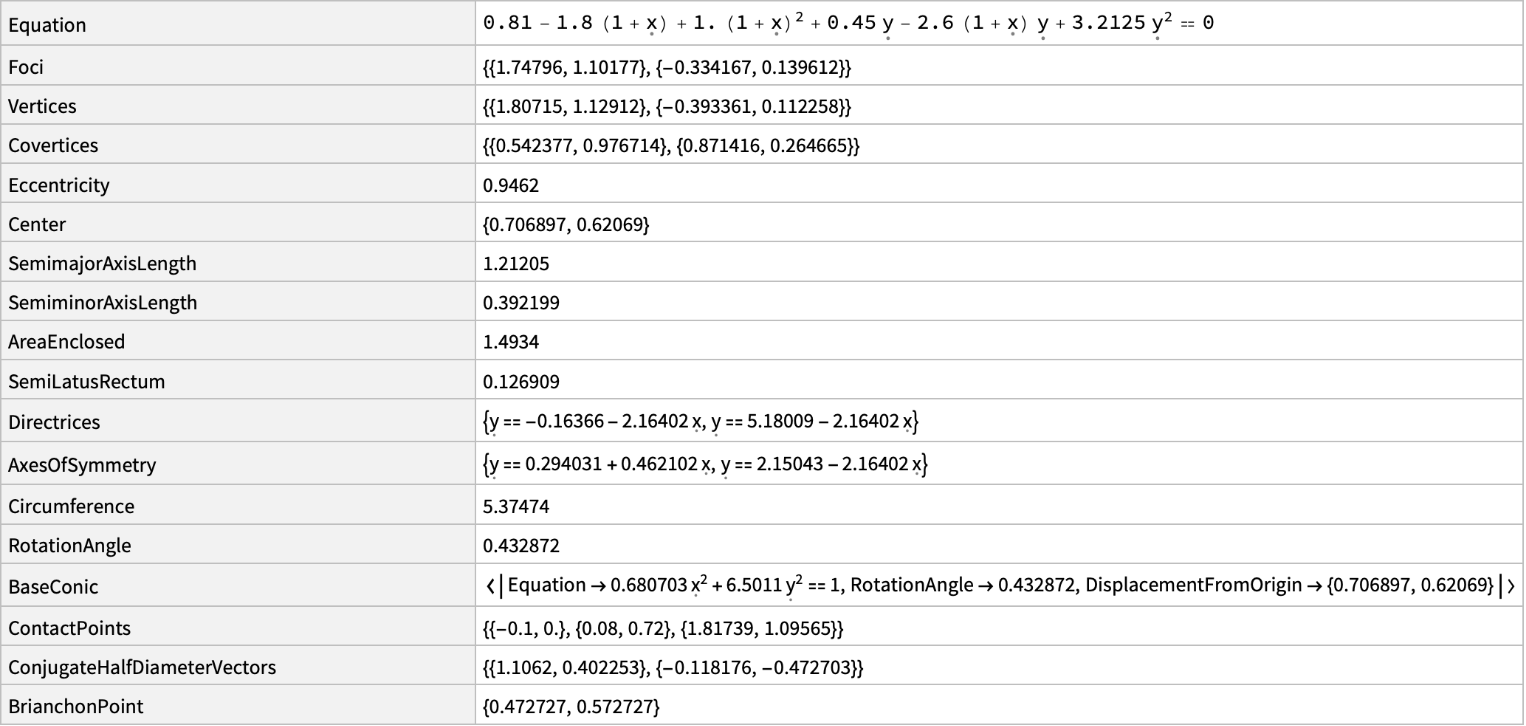
![triVtx = {{-1, 0}, {2, 0}, {1.7, 1.8}};
iepp = ResourceFunction["Inellipse"][triVtx, 0.3, 0.4, "All"];
Dataset[{iepp}]](https://www.wolframcloud.com/obj/resourcesystem/images/01c/01cfaf84-153d-492f-acc3-e2534a16eb3b/478351bf89e6b08d.png)
![contacts = MapThread[#1 /. #2 &, {
ListConvolve[{{\[Lambda]}, {1 - \[Lambda]}}, Append[triVtx, triVtx[[1]]]],
{\[Lambda] -> .3, \[Lambda] -> contact3, \[Lambda] -> 1 - .4}}];](https://www.wolframcloud.com/obj/resourcesystem/images/01c/01cfaf84-153d-492f-acc3-e2534a16eb3b/157f73c4584d581c.png)
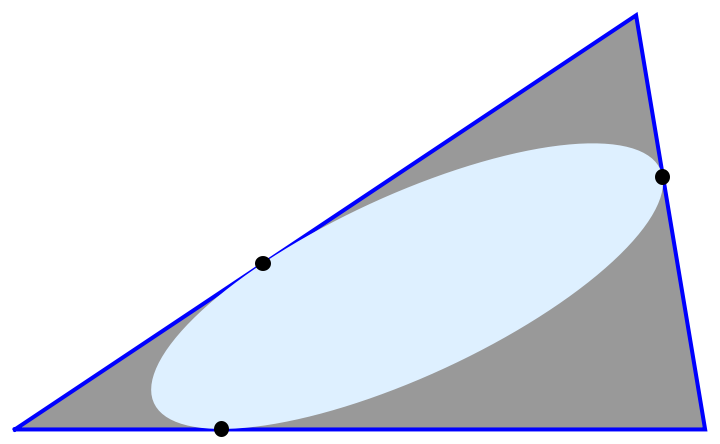
![Graphics[{
{Opacity[0.4], EdgeForm[{Thick, Blue}], Triangle[triVtx]},
{LightBlue, iep},
{Black, PointSize[0.02], Point[contacts]}
}]](https://www.wolframcloud.com/obj/resourcesystem/images/01c/01cfaf84-153d-492f-acc3-e2534a16eb3b/0a66a2370f4433af.png)
![ContourPlot[iep, {\[FormalX], -1, 2}, {\[FormalY], -0.1, 2.5},
Prolog -> {Triangle[triVtx]},
AspectRatio -> 1/1.5, Frame -> False]](https://www.wolframcloud.com/obj/resourcesystem/images/01c/01cfaf84-153d-492f-acc3-e2534a16eb3b/1c178fe5aba5635d.png)
![triVtx = {{-1, 0}, {2, 0}, {0.2, 2.1}};
vtxPair = Partition[Append[triVtx, triVtx[[1]]], 2, 1];
sideLen = EuclideanDistance[#1, #2] & @@@ vtxPair;
s = (sideLen[[1]] - sideLen[[3]] + sideLen[[2]])/(2*sideLen[[1]]);
t = (-sideLen[[1]] + sideLen[[3]] + sideLen[[2]])/(2*sideLen[[3]]);](https://www.wolframcloud.com/obj/resourcesystem/images/01c/01cfaf84-153d-492f-acc3-e2534a16eb3b/62e090b3a6b66107.png)
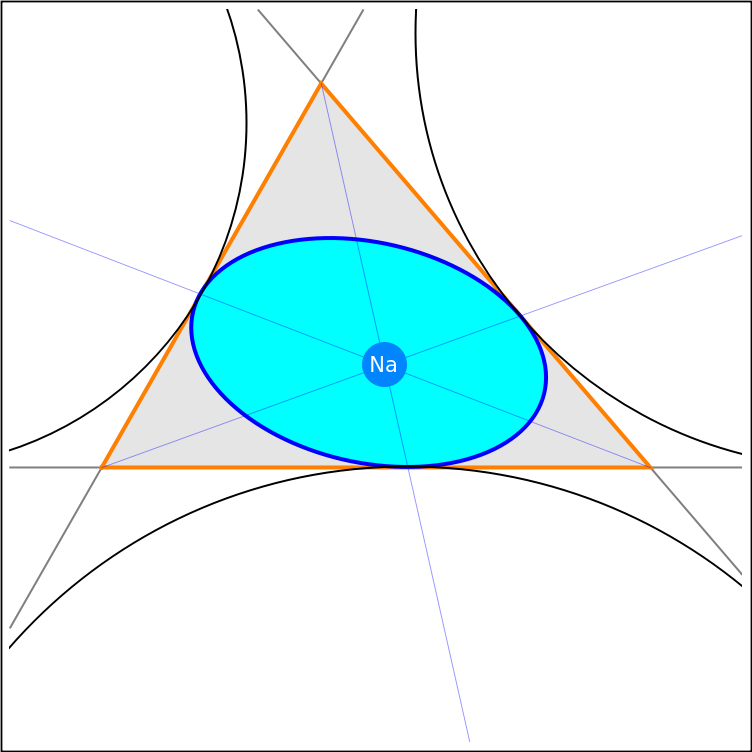
![iep = ResourceFunction["Inellipse"][triVtx, s, t];
Graphics[
{{Gray, InfiniteLine /@ vtxPair},
{EdgeForm[{Thick, Orange}], Opacity[0.1], Triangle[triVtx]},
{EdgeForm[{Thick, Blue}], Cyan, iep},
TriangleConstruct[triVtx, {"Excircle", #}] & /@ triVtx,
{Thin, Blue, HalfLine[{triVtx[[#]], na[[1]]}] & /@ {1, 2, 3}},
{PointSize[Scaled[0.06]], Hue[0.58, 1, 1], na, Text[Style["Na", White, FontSize -> Scaled[0.03]], Part[na, 1]]}
}, PlotRange -> {{-1.5, 2.5}, {-1.5, 2.5}}] // Framed](https://www.wolframcloud.com/obj/resourcesystem/images/01c/01cfaf84-153d-492f-acc3-e2534a16eb3b/686104f883bf01de.png)