Wolfram Function Repository
Instant-use add-on functions for the Wolfram Language
Function Repository Resource:
Return uniformly distributed random rotations in quaternion form
ResourceFunction["RandomRotationQuaternion"][] returns a unit quaternion from uniformly distributed random rotations. | |
ResourceFunction["RandomRotationQuaternion"][m] returns m unit quaternions from uniformly distributed random rotations. |
Generate a random orientation:
| In[1]:= |
| Out[1]= |
Generate 5 random orientations:
| In[2]:= |
| Out[2]= |  |
The norm of a quaternion corresponding to random orientations is equal to 1:
| In[3]:= |
| Out[3]= |
Generate 2500 random points on a sphere by rotating the vector {0,0,1} with random orientations:
| In[4]:= | ![v = ResourceFunction["Quaternion"] @@ {0, 0, 0, 1};
q = ResourceFunction["RandomRotationQuaternion"][2500];
qinv = Conjugate /@ q;
out = MapThread[(#1 ** v) ** #2 &, {q, qinv}];
out = Map[Rest][List @@@ out];
Graphics3D[Point[out], ImageSize -> 200]](https://www.wolframcloud.com/obj/resourcesystem/images/b85/b856cd3c-8973-42d5-9b7b-d940d124b251/6bffb39cb6df1c6e.png) |
| Out[4]= | 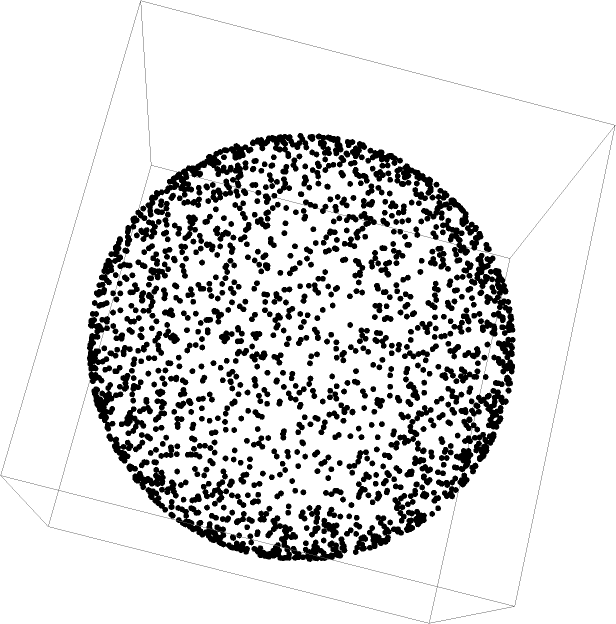 |
This work is licensed under a Creative Commons Attribution 4.0 International License