Wolfram Function Repository
Instant-use add-on functions for the Wolfram Language
Function Repository Resource:
Compute the intersection point of a plane and line
ResourceFunction["PlaneLineIntersection"][plane,line] computes the intersection of the given plane and line. |
Find the intersection of a plane and a line:
| In[1]:= |
| Out[1]= |
Find the intersection using InfinitePlane and InfiniteLine:
| In[2]:= |
| Out[2]= |
An equivalent specification:
| In[3]:= |
| Out[3]= |
Another equivalent specification:
| In[4]:= |
| Out[4]= |
Find the cevians of the circumcenter in a tetrahedron:
| In[5]:= | ![tet = {{0, 0, 0}, {1, 2, 0}, {3, 0, 0}, {1, 1, 2}};
oo = Circumsphere[tet][[1]];
cevians = Table[ResourceFunction[
"PlaneLineIntersection", ResourceSystemBase -> "https://www.wolframcloud.com/obj/resourcesystem/api/1.0"][Drop[tet, {k}], {tet[[k]], oo}], {k, 1, 4}]](https://www.wolframcloud.com/obj/resourcesystem/images/397/397e48fb-608a-4735-acfb-27f02f4b29bc/441107bfc3324ced.png) |
| Out[6]= |
Show the cevians:
| In[7]:= | ![Graphics3D[{Sphere[cevians, .05], Opacity[.5], Tetrahedron[tet], InfiniteLine@# & /@ Transpose[{tet, cevians}]}]](https://www.wolframcloud.com/obj/resourcesystem/images/397/397e48fb-608a-4735-acfb-27f02f4b29bc/792e9cfe6fe4b908.png) |
| Out[7]= | 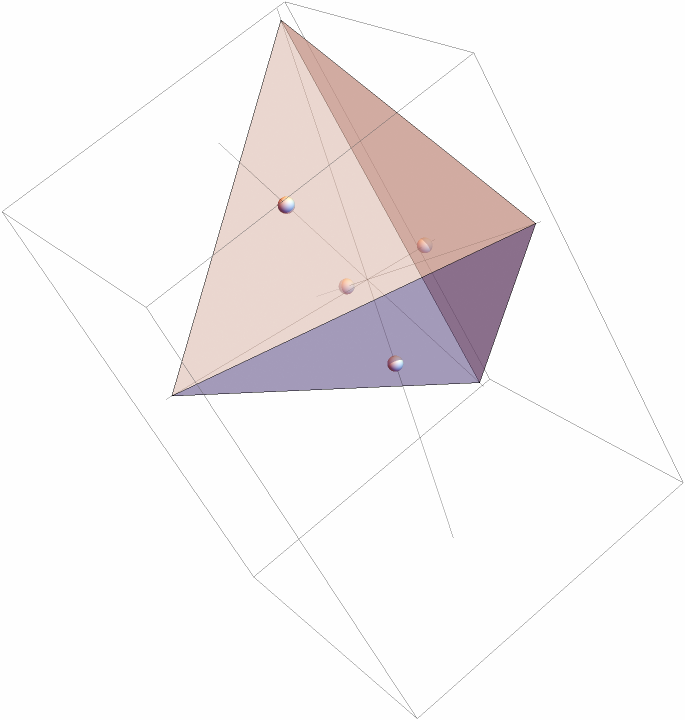 |
Find the intersection of a line and one face of the d120:
| In[8]:= | ![vert = PolyhedronData["DisdyakisTriacontahedron", "VertexCoordinates"];
face = PolyhedronData["DisdyakisTriacontahedron", "FaceIndices"];
N[ResourceFunction[
"PlaneLineIntersection", ResourceSystemBase -> "https://www.wolframcloud.com/obj/resourcesystem/api/1.0"][vert[[face[[1]]]], {{0, 0, 0}, {1, 2, 3}}]]](https://www.wolframcloud.com/obj/resourcesystem/images/397/397e48fb-608a-4735-acfb-27f02f4b29bc/3230e135270f374d.png) |
| Out[10]= |
Find intersections for all 120 infinite planes and find the time required:
| In[11]:= |
| Out[11]= |
Find intersections for all 120 planes with RegionIntersection and find the time required:
| In[12]:= | ![Timing[ri = Table[RegionIntersection[InfinitePlane[N[vert[[face[[k]]]]]], InfiniteLine[{{0, 0, 0}, {1, 2, 3}}]][[1]], {k, 1, 120}];]](https://www.wolframcloud.com/obj/resourcesystem/images/397/397e48fb-608a-4735-acfb-27f02f4b29bc/0437f0651b9ddd72.png) |
| Out[12]= |
Check for equality:
| In[13]:= |
| Out[13]= |
PlaneLineIntersection returns an empty set if the plane and line are parallel, or the line falls in the plane:
| In[14]:= |
| Out[14]= |
Wolfram Language 13.0 (December 2021) or above
This work is licensed under a Creative Commons Attribution 4.0 International License