Details
The acronym ODE stands for "ordinary differential equation."
Specification of variables
{λ,ϕ,α} is optional if the Hamiltonian is written in terms of the formal action-angle variables

.
Input Hamiltonian
H should be polynomial in

and linear in

, something like

.
Input Hamiltonian H can also be specified in Cartesian (p,q) or spherical (X,Y,Z) coordinates.
Spherical curves are drawn on the surface of a unit sphere, X 2+Y 2+Z 2=1.
The default rewrite rules change from either system to action-angle coordinates:
| Cartesian |  |
| Spherical |  |
Note: Both the plane and the sphere are symplectic manifolds with canonical action-angle coordinates.
Time t is defined in terms of the tangents Dt{λ,ϕ}={-∂ϕH,∂λH}.
The invariant time differential may then be written most directly as dt=dϕ/(∂λH).
Subsequent α-derivatives of the integrand dt are written as (∂α)ndt=(∂λH)dt(∂α)n1/(∂λH).
Here we operate ∂α through λ via the chain rule with ∂αλ=1/(∂λH). For example: ∂αf(α, λ(α))=f(1,0)(α,λ(α))+f(0,1)(α, λ(α))/(∂λH).
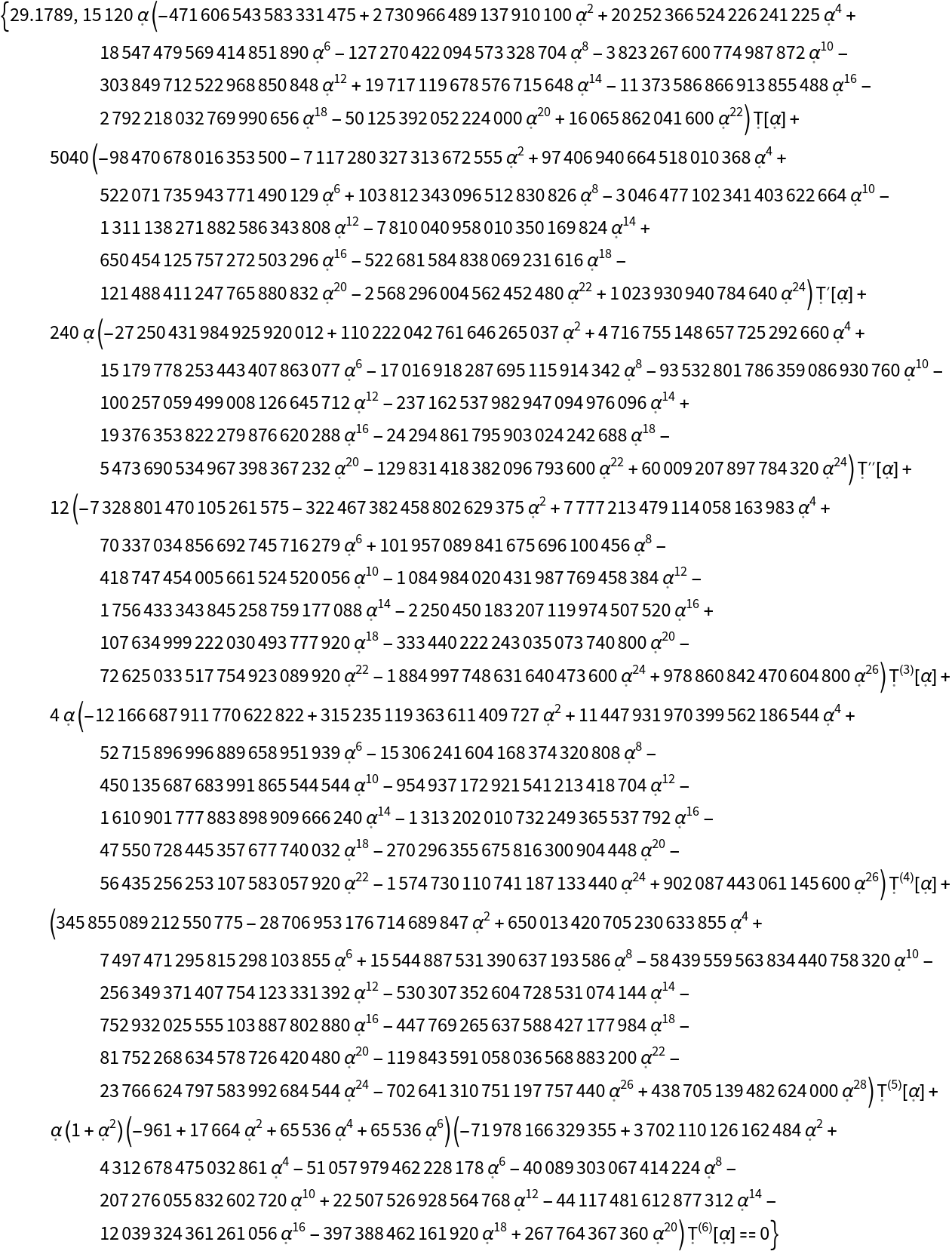
The primary task of
ResourceFunction["DihedralODE"] is to compute a set of coefficients
cn(α) and a certificate
Ξ(q,p) such that

. When this condition is satisfied, the exact differential can be integrated to zero around a contour, which implies

The form of the minimal output is an ordinary differential equation constraining period functions T(α).
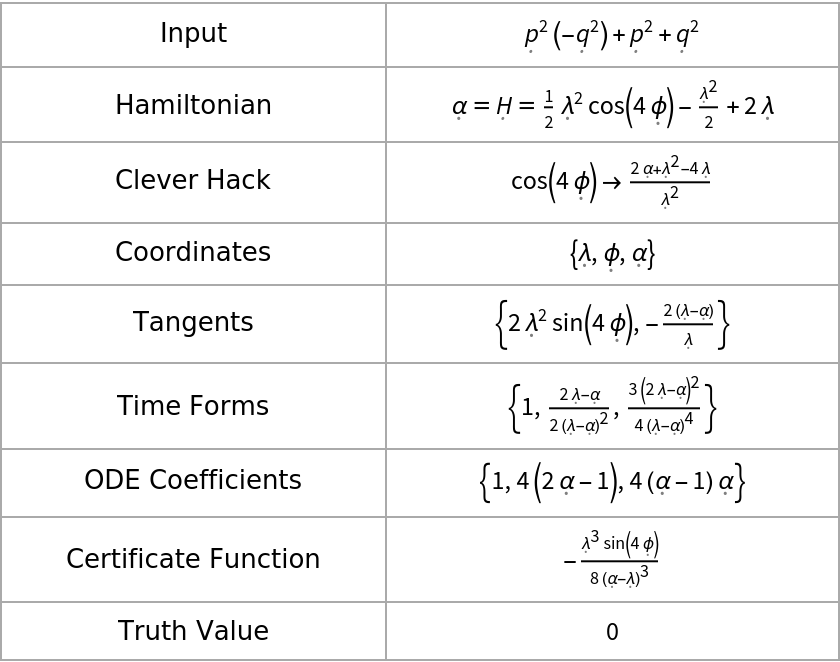
The proof data described above can be put into an
Association:
| PastedInput | H |
| Hamiltonian | α=H |
| Coordinates | {λ,ϕ,α} |
| Tangents | {-∂ϕH,∂λH} |
| Time Forms | (∂α)ndt,n=0, 1, … |
| ODE Coefficients | cn,n=0, 1, … |
| Certificate Function |  |
| Truth Value |  |
The last item with the key "Truth Value" should auto-evaluate to 0 for valid data.
By applying a clever hack, ∂λH can be written as a ratio of λ-polynomials. If it succeeds, the algorithm should proceed rapidly to a solution, whereas if it fails the algorithm stops.
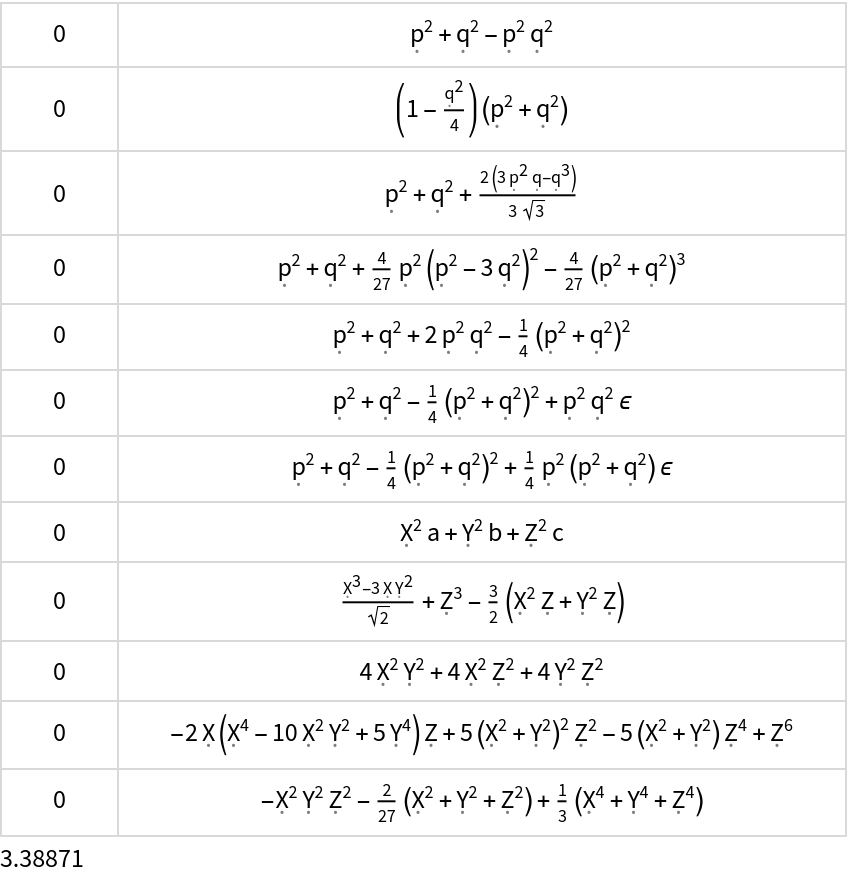
Caveat emptor: This function is effective for a few interesting results but comes with no warranty otherwise!
![With[{hyper2F1pars = First[
Solve[# == 0 & /@ Flatten[CoefficientList[
ResourceFunction[
"DihedralODE"][\[FormalP]^2 + \[FormalQ]^2 - \[FormalP]^2 \[FormalQ]^2, True]["ODE Coefficients"]
- {-a b, c - (a + b + 1) \[FormalAlpha], \[FormalAlpha] (1 - \[FormalAlpha])} k, \[FormalAlpha]]]]]},
TraditionalForm[\[FormalCapitalT][ \[FormalAlpha]] == Pi Hypergeometric2F1[a, b, c, \[FormalAlpha]] /. hyper2F1pars]]](https://www.wolframcloud.com/obj/resourcesystem/images/f74/f740a19a-298d-4fe9-bbc4-0abd3e8dfdb7/1a1a79bdd49f54e0.png)
![Grid[Transpose[{Text /@ Keys[#], TraditionalForm /@ Values[#]}],
Frame -> All, FrameStyle -> Lighter@Gray, Spacings -> {5, 1}
] &@ResourceFunction[
"DihedralODE"][\[FormalP]^2 + \[FormalQ]^2 - \[FormalP]^2 \[FormalQ]^2, True]](https://www.wolframcloud.com/obj/resourcesystem/images/f74/f740a19a-298d-4fe9-bbc4-0abd3e8dfdb7/4096ddc3af7df1f7.png)
![With[{dihedralExamples = {\[FormalP]^2 + \[FormalQ]^2 - \[FormalP]^2 \[FormalQ]^2, (
1 + Rational[-1, 4] \[FormalQ]^2) (\[FormalP]^2 + \[FormalQ]^2), \[FormalP]^2 + \[FormalQ]^2 + (
Rational[2, 3]
3^Rational[-1, 2]) ((
3 \[FormalP]^2) \[FormalQ] - \[FormalQ]^3), \[FormalP]^2 + \[FormalQ]^2 + (
Rational[
4, 27] \[FormalP]^2) (\[FormalP]^2 - 3 \[FormalQ]^2)^2 + Rational[-4, 27] (\[FormalP]^2 + \[FormalQ]^2)^3, \[FormalP]^2 + \[FormalQ]^2 + (
2 \[FormalP]^2) \[FormalQ]^2 + Rational[-1, 4] (\[FormalP]^2 + \[FormalQ]^2)^2, \[FormalP]^2 + \[FormalQ]^2 + Rational[-1, 4] (\[FormalP]^2 + \[FormalQ]^2)^2 + (\[FormalP]^2 \[FormalQ]^2) \[Epsilon], \[FormalP]^2 + \[FormalQ]^2 + Rational[-1, 4] (\[FormalP]^2 + \[FormalQ]^2)^2 + ((
Rational[
1, 4] \[FormalP]^2) (\[FormalP]^2 + \[FormalQ]^2)) \[Epsilon], \[FormalCapitalX]^2 a + \[FormalCapitalY]^2 b + \[FormalCapitalZ]^2 c, 2^Rational[-1, 2] (\[FormalCapitalX]^3 - (
3 \[FormalCapitalX]) \[FormalCapitalY]^2) + \[FormalCapitalZ]^3 + Rational[-3, 2] (\[FormalCapitalX]^2 \[FormalCapitalZ] + \[FormalCapitalY]^2 \[FormalCapitalZ]), (4 \[FormalCapitalX]^2) \[FormalCapitalY]^2 + (
4 \[FormalCapitalX]^2) \[FormalCapitalZ]^2 + (
4 \[FormalCapitalY]^2) \[FormalCapitalZ]^2, (((-2) \[FormalCapitalX]) (\[FormalCapitalX]^4 - (
10 \[FormalCapitalX]^2) \[FormalCapitalY]^2 + 5 \[FormalCapitalY]^4)) \[FormalCapitalZ] + (
5 (\[FormalCapitalX]^2 + \[FormalCapitalY]^2)^2) \[FormalCapitalZ]^2 - (
5 (\[FormalCapitalX]^2 + \[FormalCapitalY]^2)) \[FormalCapitalZ]^4 + \[FormalCapitalZ]^6, ((-\[FormalCapitalX]^2) \[FormalCapitalY]^2) \[FormalCapitalZ]^2 + Rational[-2, 27] (\[FormalCapitalX]^2 + \[FormalCapitalY]^2 + \[FormalCapitalZ]^2) + Rational[
1, 3] (\[FormalCapitalX]^4 + \[FormalCapitalY]^4 + \[FormalCapitalZ]^4)}},
Column[Reverse@AbsoluteTiming[Grid[
With[{res = ResourceFunction["DihedralODE"][#, True]}, {res[
"Truth Value"], #}] & /@ dihedralExamples ,
Frame -> All, Spacings -> {4, 1}, FrameStyle -> LightGray]]]]](https://www.wolframcloud.com/obj/resourcesystem/images/f74/f740a19a-298d-4fe9-bbc4-0abd3e8dfdb7/72a3162e22cfc509.png)
![AnnihilationCondition[vars_, tans_, dtForms_, coefficients_, cert_, qVal_
] := Factor[Plus[Dot[D[cert, #] & /@ vars[[1 ;; 2]],
tans] /. {Cos[_] -> \[FormalCapitalQ], Sin[_] -> \[FormalCapitalP]} /. {
\[FormalCapitalP] -> Sqrt[1 - \[FormalCapitalQ]^2]} /. {\[FormalCapitalQ] -> qVal},
dtForms . coefficients]]](https://www.wolframcloud.com/obj/resourcesystem/images/f74/f740a19a-298d-4fe9-bbc4-0abd3e8dfdb7/274207113e96f223.png)
![With[{proof = ResourceFunction["DihedralODE"][
\[FormalP]^2 + \[FormalQ]^2 - \[FormalP]^2 \[FormalQ]^2, True]},
AnnihilationCondition[
proof["Coordinates"],
proof["Tangents"],
proof["Time Forms"],
proof["ODE Coefficients"],
proof["Certificate Function"],
proof["Clever Hack"][[2]]
]]](https://www.wolframcloud.com/obj/resourcesystem/images/f74/f740a19a-298d-4fe9-bbc4-0abd3e8dfdb7/022d79daa12f7464.png)