Wolfram Function Repository
Instant-use add-on functions for the Wolfram Language
Function Repository Resource:
Compute the final angles and spring length of a coupled pendulum based on initial conditions
ResourceFunction["CoupledPendulumFormula"][parameters,initalcond] computes the angles and spring length based on system parameters and initial conditions initialcond. | |
ResourceFunction["CoupledPendulumFormula"][property] returns the specified property of the coupled pendulum formula. |
| d | pivot distance |
| k | spring constant |
| l0 | spring equalibrium length |
| l1 | pendulum 1 length |
| l2 | pendulum 2 length |
| m1 | pendulum 1 mass |
| m2 | pendulum 2 mass |
| li | initial spring length |
| t | time |
| θ1,i | pendulum 1 initial angle from vertical |
| θ2,i | pendulum 2 initial angle from vertical |
| "Formula" | equations for spring pendulum |
| "QuantityVariableDimensions" | list of base dimensions for all variables |
| "QuantityVariableNames" | English names for all variables |
| "QuantityVariablePhysicalQuantities" | physical quantities for all variables |
| "QuantityVariables" | list of all variables |
| "QuantityVariableTable" | details on all variables |
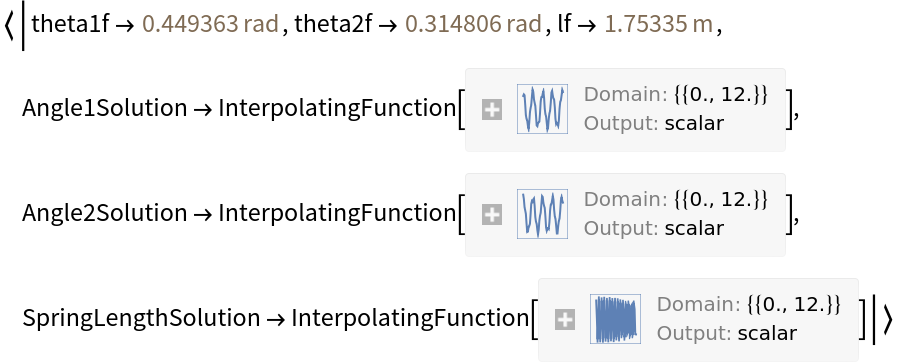
Solve for the final spring length and final angles from the vertical for a coupled pendulum:
| In[1]:= |
![ResourceFunction["CoupledPendulumFormula"][
Association["d" -> Quantity[2, "Meters"], "k" -> Quantity[150, "Newtons"/"Meters"], "l1" -> Quantity[2, "Meters"], "l2" -> Quantity[2, "Meters"], "l0" -> Quantity[2, "Meters"], "m1" -> Quantity[5, "Kilograms"], "m2" -> Quantity[5, "Kilograms"]], Association["theta1i" -> Quantity[20, "AngularDegrees"], "theta2i" -> Quantity[30, "AngularDegrees"], "t" -> Quantity[12, "Seconds"]]]](https://www.wolframcloud.com/obj/resourcesystem/images/9bb/9bb31a31-4733-4e63-982c-2f65d81ff47d/76257884cf0daa67.png)
|
| Out[1]= |
|
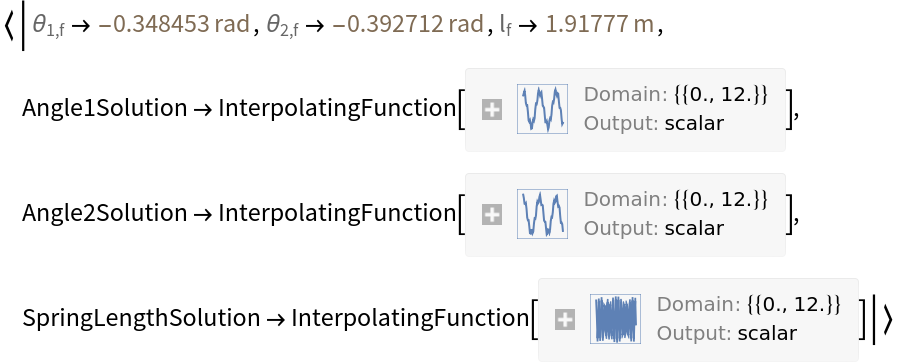
Specify gravitational acceleration:
| In[2]:= |
![ResourceFunction["CoupledPendulumFormula"][
Association["d" -> Quantity[2, "Meters"], "k" -> Quantity[150, "Newtons"/"Meters"], "l1" -> Quantity[2, "Meters"], "l2" -> Quantity[2, "Meters"], "l0" -> Quantity[2, "Meters"], "m1" -> Quantity[5, "Kilograms"], "m2" -> Quantity[5, "Kilograms"], "g" -> Entity["Planet", "Mars"][
EntityProperty["Planet", "Gravity"]]], Association["theta1i" -> Quantity[20, "AngularDegrees"], "theta2i" -> Quantity[30, "AngularDegrees"], "t" -> Quantity[12, "Seconds"]]]](https://www.wolframcloud.com/obj/resourcesystem/images/9bb/9bb31a31-4733-4e63-982c-2f65d81ff47d/0831951d439f3386.png)
|
| Out[2]= |
|
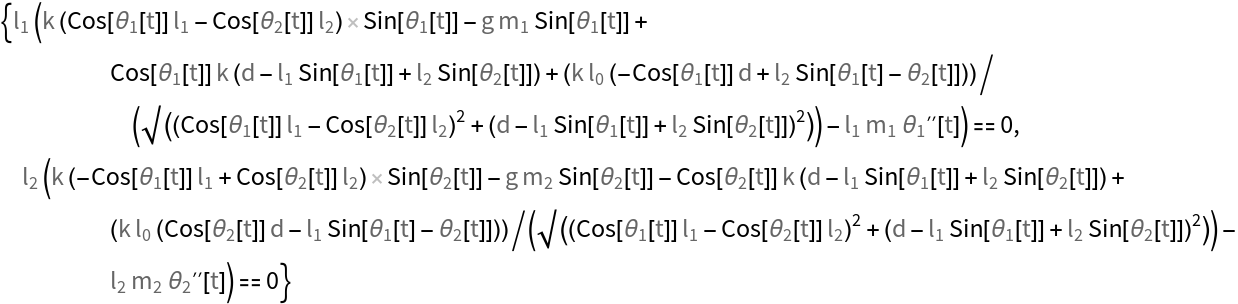
Examine the equations of motion for a coupled pendulum:
| In[3]:= |
|
| Out[3]= |
|
Find the quantity variables used by the CoupledPendulumFormula:
| In[4]:= |
|
| Out[4]= |
|
Obtain their formal names:
| In[5]:= |
|
| Out[5]= |

|
Derive the physical quantities and unit dimensions of the variables:
| In[6]:= |
|
| Out[6]= |
|
| In[7]:= |
|
| Out[7]= |

|
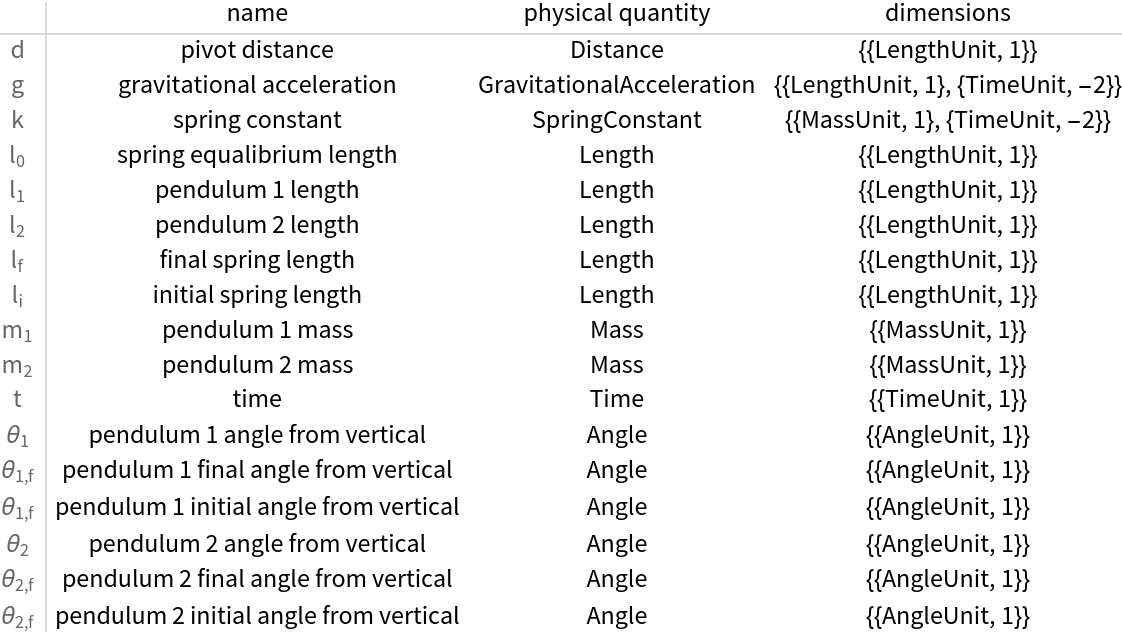
Examine a table combining all the information about the quantity variables used or derived by CoupledPendulumFormula:
| In[8]:= |
|
| Out[8]= |
|
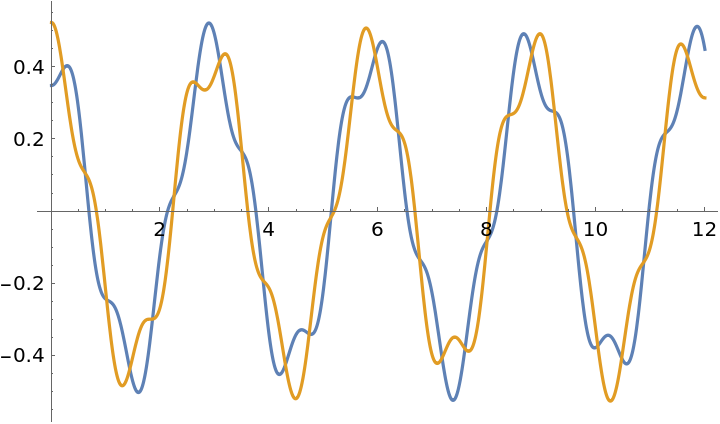
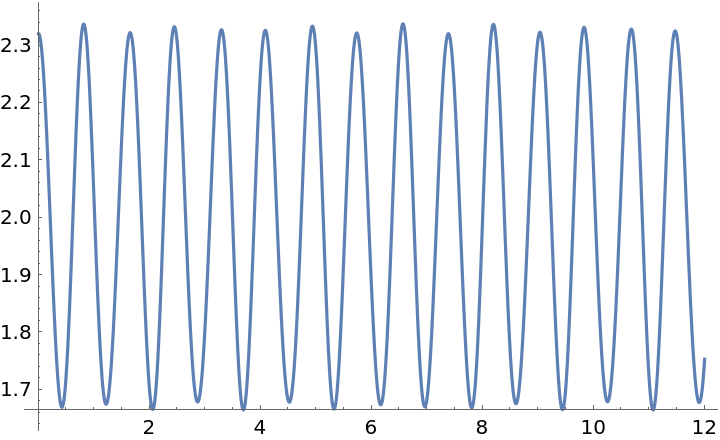
See how the pendulum angles and spring length evolve over time:
| In[9]:= |
|
| Out[9]= |
|
| In[10]:= |
|
| Out[10]= |
|
This work is licensed under a Creative Commons Attribution 4.0 International License