DuganHammock/ConvexPolytope
(1.0.0)
current version: 1.0.3 »
Installation Instructions
To install this paclet in your Wolfram Language environment,
evaluate this code:
PacletInstall["DuganHammock/ConvexPolytope"]
To load the code after installation, evaluate this code:
Needs["DuganHammock`ConvexPolytope`"]
Examples
Scope
3D slices of a 4D hypercube (tesseract)
600-cell (hexacosichoron)
120-cell (dodecacontachoron)
Publisher
Dugan Hammock
Compatibility
Wolfram Language Version 13.3
Version History
-
1.0.3
– 15 May 2025
-
1.0.2
– 26 July 2023
-
1.0.1
– 21 July 2023
-
1.0.0
– 19 July 2023
MIT License
Paclet Source

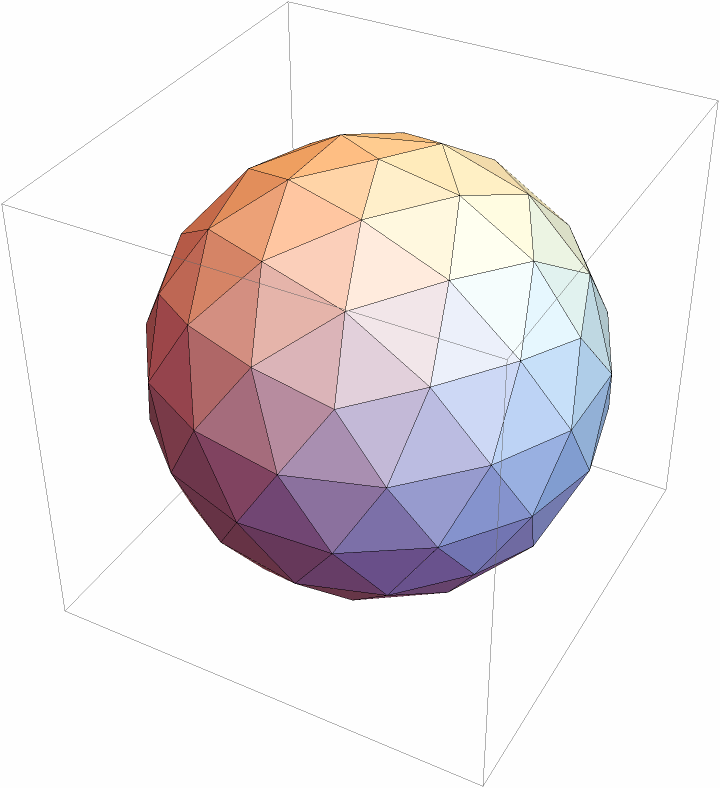
![vertices = RandomInteger[{-4, 4}, {50, 3}];
polytope = ConvexPolytope[vertices];
polytope // Polygon // Graphics3D](https://www.wolframcloud.com/obj/resourcesystem/images/703/703e94b5-7e08-4c0f-ac24-9023cf425fe2/1-0-0/4abb113c25cf02e3.png)
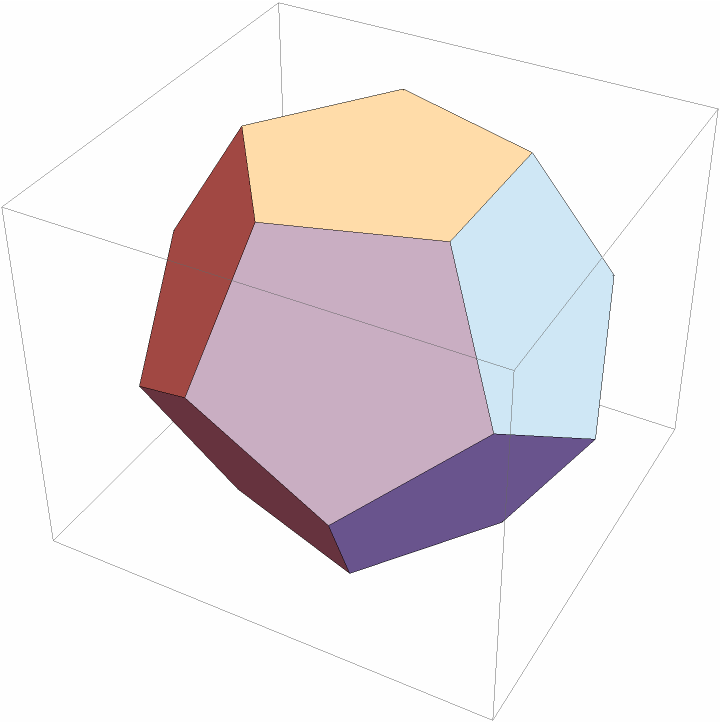
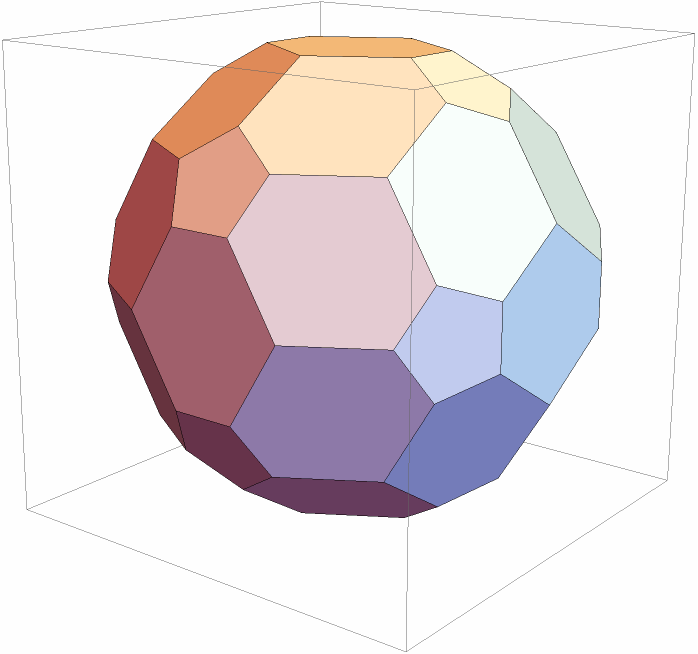
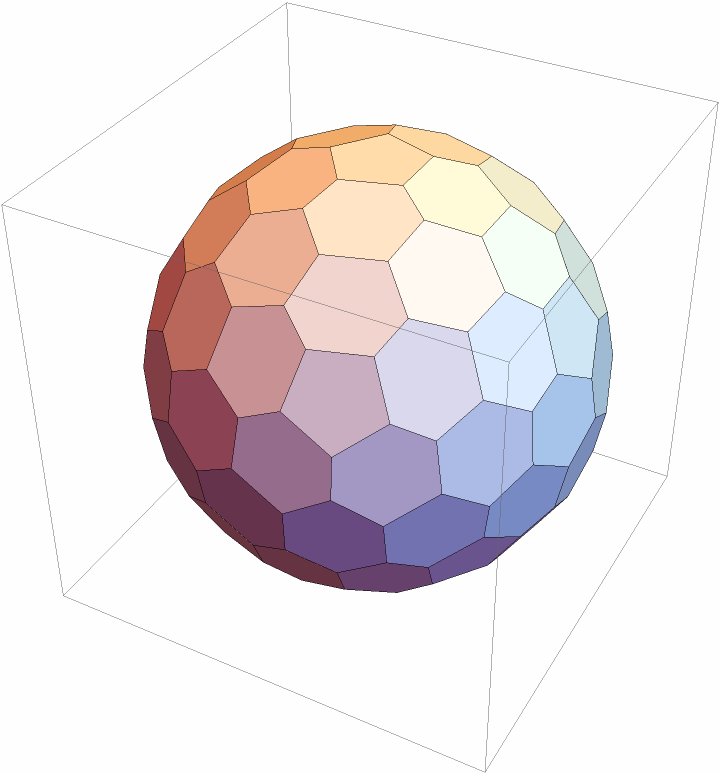
![polytope = PolyhedronData["Dodecahedron", "VertexCoordinates"] // N // ConvexPolytope;
polytope = Join[polytope["Vertices"], Map[Mean, polytope["Facets"]]] // Map[Normalize] // ConvexPolytope;
polytope // Polygon // Graphics3D](https://www.wolframcloud.com/obj/resourcesystem/images/703/703e94b5-7e08-4c0f-ac24-9023cf425fe2/1-0-0/43a9adf58ee2ac30.png)
![polytope = PolyhedronData["Dodecahedron", "VertexCoordinates"] // N // ConvexPolytope;
polytope = Join[polytope["Vertices"], Map[Mean, polytope["Facets"]]] // Map[Normalize] // ConvexPolytope;
polytope = Join[polytope["Vertices"], Map[Mean, polytope["Facets"]]] // Map[Normalize] // ConvexPolytope;
polytope // Polygon // Graphics3D](https://www.wolframcloud.com/obj/resourcesystem/images/703/703e94b5-7e08-4c0f-ac24-9023cf425fe2/1-0-0/5db52c5e05e5ef10.png)
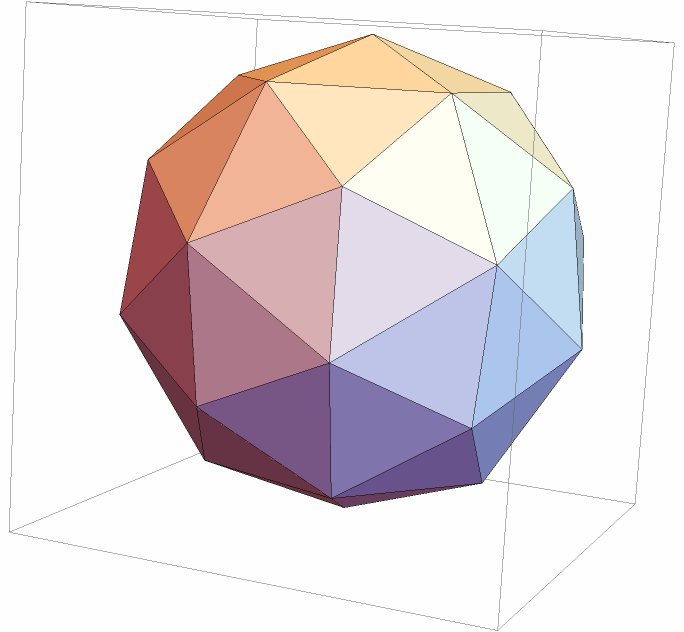
![polytope = PolyhedronData["Dodecahedron", "VertexCoordinates"] // N // ConvexPolytope;
polytope = Join[polytope["Vertices"], Map[Mean, polytope["Facets"]]] // Map[Normalize] // ConvexPolytope;
polytope = Join[polytope["Vertices"], Map[Mean, polytope["Facets"]]] // Map[Normalize] // ConvexPolytope;
polytope = polytope // ConvexPolytopeDual;
polytope // Polygon // Graphics3D](https://www.wolframcloud.com/obj/resourcesystem/images/703/703e94b5-7e08-4c0f-ac24-9023cf425fe2/1-0-0/30f688d19d38d172.png)
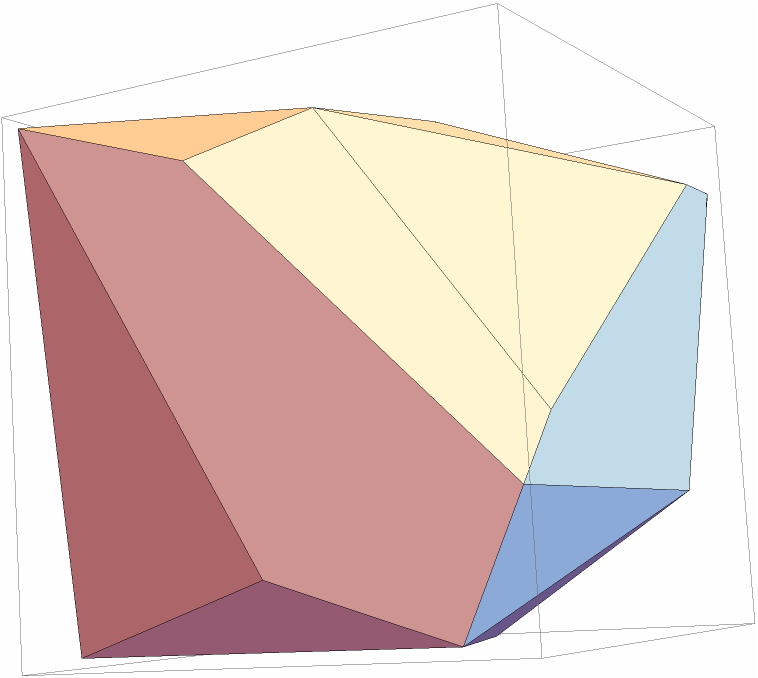
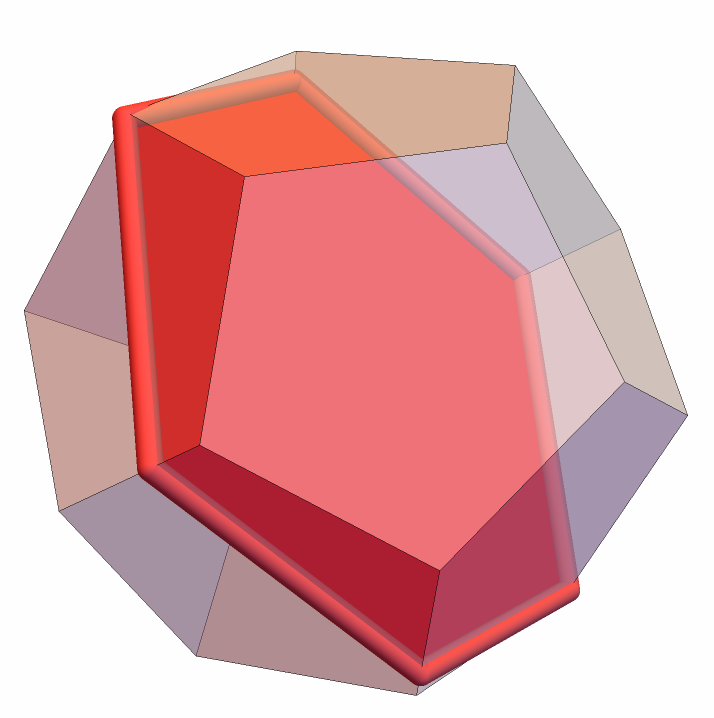
![polytope = PolyhedronData["Dodecahedron", "VertexCoordinates"] // N // ConvexPolytope;
polytopeSlice = polytope["Slice", {1, 1, 1}, 0.0];
Graphics3D[{
{Opacity[0.5], polytope // Polygon},
{Red, polytopeSlice // Polygon},
{Lighter[Red], polytopeSlice // Tube[.05]},
}, Boxed -> False]](https://www.wolframcloud.com/obj/resourcesystem/images/703/703e94b5-7e08-4c0f-ac24-9023cf425fe2/1-0-0/13095f3c5544f8a1.png)
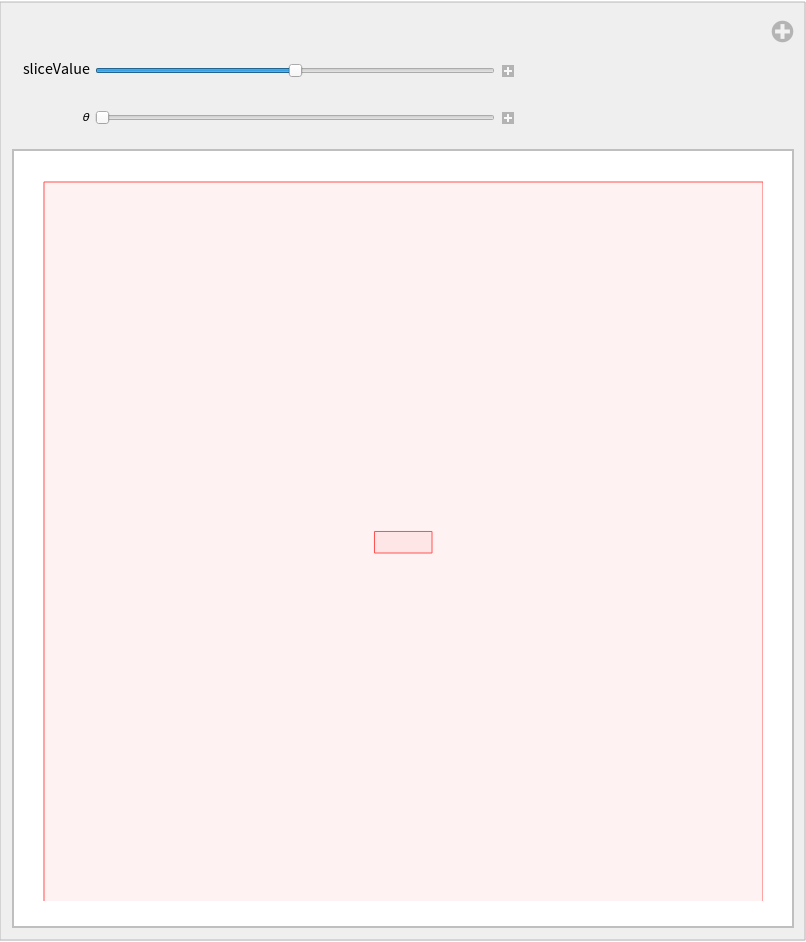
![Manipulate[
skewMatrix4D = {{1, 0, 0, 0}, {0, 1, 0, 0}, {0, 0, 1, 0}, {3, 1, 1, 1}}; hypercubeVertices = Tuples[{-1, 1}, {4}] // N // Map[Normalize];
hypercubeVertices = hypercubeVertices . RotationMatrix[\[Theta], {{1, 1, 1, 1}, {0, 0, 0, 1}}]\[Transpose];
hypercubeVertices = hypercubeVertices . skewMatrix4D; hypercubePolytope = hypercubeVertices // N // ConvexPolytope; hypercubeSlicePolytope = hypercubePolytope["Slice", {0, 0, 0, 1}, sliceValue]; Graphics3D[{
Specularity[1, 20],
{Gray, hypercubePolytope // Tube[.03]},
If[Positive[hypercubeSlicePolytope["Dimension"]],
{
{Red, hypercubeSlicePolytope // Polygon},
{Black, hypercubeSlicePolytope // Tube[0.05]},
{Black, hypercubeSlicePolytope // Sphere[0.1]}
}
]
}
, PlotRange -> 3
, Boxed -> False
]
, {{sliceValue, 0.}, -1, 1}
, {{\[Theta], 0.}, 0., Pi/2.}
, {skewMatrix4D, None}
, {hypercubeVertices, None}
, {hypercubePolytope, None}
, {hypercubeSlicePolytope, None}
, TrackedSymbols :> {sliceValue, \[Theta]}
]](https://www.wolframcloud.com/obj/resourcesystem/images/703/703e94b5-7e08-4c0f-ac24-9023cf425fe2/1-0-0/561d9cc6b242c1e7.png)
![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/d28cbb65-c49b-4a80-b29d-f2447db93601"]](https://www.wolframcloud.com/obj/resourcesystem/images/703/703e94b5-7e08-4c0f-ac24-9023cf425fe2/1-0-0/68cfad2f100a693d.png)
![c120Polytope = c600Polytope // ConvexPolytopeDual;
c120Polytope["FaceCounts"]
c120SlicePolytope = c120Polytope["Slice", {0, 0, 0, 1}, 0];
c120SlicePolytope // Polygon // Graphics3D](https://www.wolframcloud.com/obj/resourcesystem/images/703/703e94b5-7e08-4c0f-ac24-9023cf425fe2/1-0-0/72cde3d5e5c34fca.png)