Resource retrieval
Get the pre-trained net:
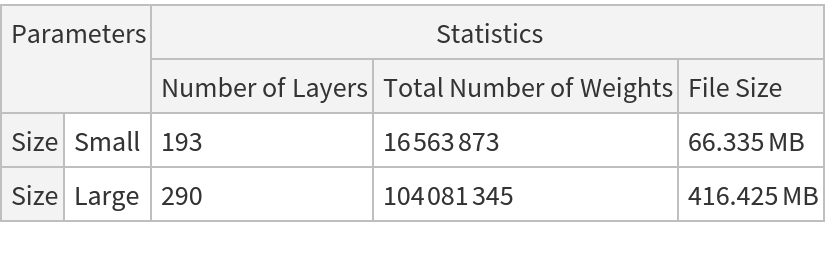
NetModel parameters
This model consists of a family of individual nets, each identified by a specific parameter combination. Inspect the available parameters:
Pick a non-default net by specifying the parameters:
Pick a non-default uninitialized net:
Basic usage
Define a test image:
Obtain the depth map of an image:
Show the depth map:
Visualize a 3D model
Get an image:
Obtain the depth map:
Visualize a 3D model using the depth map:
Adapt to any size
The net resizes the input image to 256x256 pixels and produces a depth map of the same size:
The recommended way to obtain a depth map with the same dimensions of the input image is to resample the depth map after the net evaluation. Get an image:
Obtain the depth map and resize it to match the original image dimensions:
Now modify the net, changing the image size in the NetEncoder. The new net natively produces a depth map of the original image's size:
Obtain the depth map from the new net and visualize it:
Compare the results. Notice that the depth map obtained by resizing the net output (top-right corner, depthMap1) more accurately predicts the depth of the roof lamp and the carpet but is less accurate at predicting the depth of the background furniture:
The first pipeline is also faster:
Net information
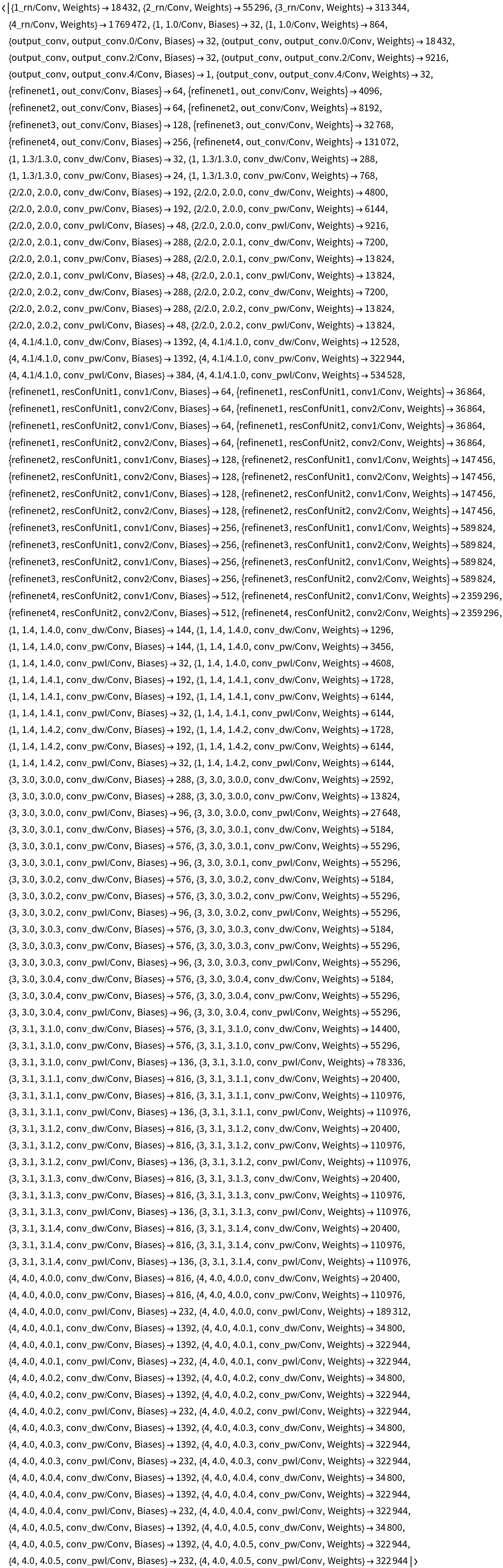
Inspect the number of parameters of all arrays in the net:
Obtain the total number of parameters:
Obtain the layer type counts:
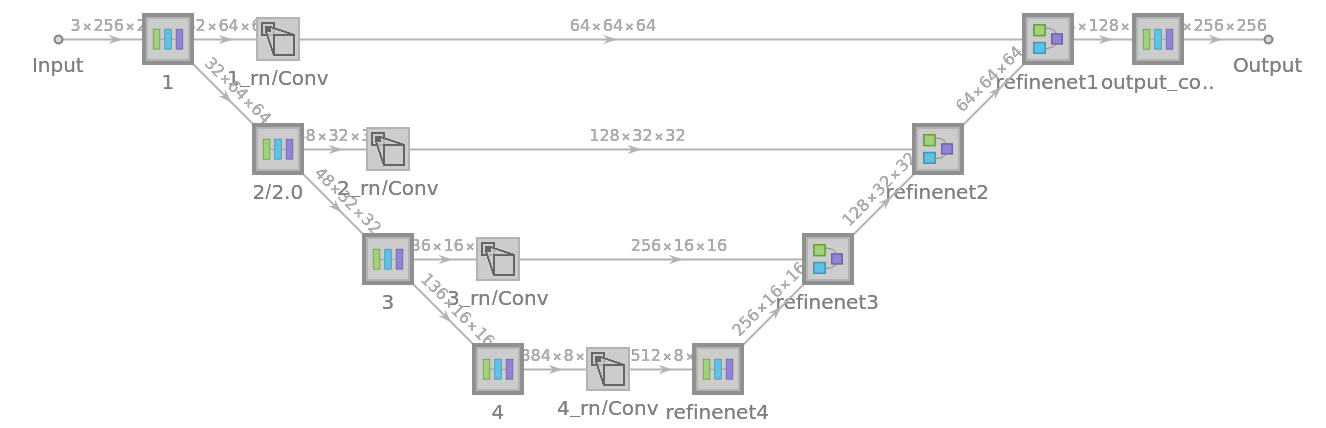
Display the summary graphic:
Export to ONNX
Export the net to the ONNX format:
Get the size of the ONNX file:
The size is similar to the byte count of the resource object:
Check some metadata of the ONNX model:
Import the model back into Wolfram Language. However, the NetEncoder and NetDecoder will be absent because they are not supported by ONNX:
![NetModel["MiDaS V2.1 Depth Perception Nets Trained on Multiple-Datasets", "ParametersInformation"]](https://www.wolframcloud.com/obj/resourcesystem/images/d99/d990eb12-b645-498f-bbcb-601a25e0d8c9/3128684b57dff4c0.png)
![NetModel[{"MiDaS V2.1 Depth Perception Nets Trained on Multiple-Datasets", "Size" -> "Large"}, "UninitializedEvaluationNet"]](https://www.wolframcloud.com/obj/resourcesystem/images/d99/d990eb12-b645-498f-bbcb-601a25e0d8c9/149d3d7bd3006a8e.png)
![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/4bd7b1eb-424d-41d8-b189-dcf0e584f339"]](https://www.wolframcloud.com/obj/resourcesystem/images/d99/d990eb12-b645-498f-bbcb-601a25e0d8c9/6dd40f6358be37b8.png)

![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/fa4013e8-8644-41d9-bdd8-4f8a21785852"]](https://www.wolframcloud.com/obj/resourcesystem/images/d99/d990eb12-b645-498f-bbcb-601a25e0d8c9/428f603db58c330e.png)
![depthMap = ImageResize[
NetModel[
"MiDaS V2.1 Depth Perception Nets Trained on Multiple-Datasets"]@
img,
ImageDimensions@img
];](https://www.wolframcloud.com/obj/resourcesystem/images/d99/d990eb12-b645-498f-bbcb-601a25e0d8c9/7d87c2f9a14e4750.png)
![ListPlot3D[ImageData[depthMap], PlotStyle -> Texture[ImageReflect@img], PlotTheme -> {"Minimal", "NoAxes"}, ViewPoint -> {0.002, 0.8, 1.2}]](https://www.wolframcloud.com/obj/resourcesystem/images/d99/d990eb12-b645-498f-bbcb-601a25e0d8c9/04eb49c43bc4d1d3.png)

![NetExtract[
NetModel[
"MiDaS V2.1 Depth Perception Nets Trained on Multiple-Datasets"], {"Input", "ImageSize"}]](https://www.wolframcloud.com/obj/resourcesystem/images/d99/d990eb12-b645-498f-bbcb-601a25e0d8c9/278e23e30043b351.png)
![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/19297e82-8fa0-4b9d-b0c8-5163e68eb120"]](https://www.wolframcloud.com/obj/resourcesystem/images/d99/d990eb12-b645-498f-bbcb-601a25e0d8c9/75feb46506635f54.png)
![{time1, depthMap1} = RepeatedTiming@ImageResize[
NetModel[
"MiDaS V2.1 Depth Perception Nets Trained on Multiple-Datasets"][img],
imgDims,
Resampling -> "Cubic"
];](https://www.wolframcloud.com/obj/resourcesystem/images/d99/d990eb12-b645-498f-bbcb-601a25e0d8c9/70cb7f186ac70329.png)

![resizedNet = NetReplacePart[
NetModel[
"MiDaS V2.1 Depth Perception Nets Trained on Multiple-Datasets"], {"Input", "ImageSize"} -> imgDims]](https://www.wolframcloud.com/obj/resourcesystem/images/d99/d990eb12-b645-498f-bbcb-601a25e0d8c9/435b6639fc339452.png)

![ImageCollage[{
0.8 -> img,
0.2 -> depthMap1,
0.2 -> depthMap2
}]](https://www.wolframcloud.com/obj/resourcesystem/images/d99/d990eb12-b645-498f-bbcb-601a25e0d8c9/4d83a91ecbefcab1.png)

![Information[
NetModel[
"MiDaS V2.1 Depth Perception Nets Trained on Multiple-Datasets"], "ArraysElementCounts"]](https://www.wolframcloud.com/obj/resourcesystem/images/d99/d990eb12-b645-498f-bbcb-601a25e0d8c9/69dfa3339b38e3fe.png)
![Information[
NetModel[
"MiDaS V2.1 Depth Perception Nets Trained on Multiple-Datasets"], "ArraysTotalElementCount"]](https://www.wolframcloud.com/obj/resourcesystem/images/d99/d990eb12-b645-498f-bbcb-601a25e0d8c9/4295f3cc31e6820d.png)
![Information[
NetModel[
"MiDaS V2.1 Depth Perception Nets Trained on Multiple-Datasets"], "LayerTypeCounts"]](https://www.wolframcloud.com/obj/resourcesystem/images/d99/d990eb12-b645-498f-bbcb-601a25e0d8c9/5b3675f545a83de2.png)
![Information[
NetModel[
"MiDaS V2.1 Depth Perception Nets Trained on Multiple-Datasets"], "SummaryGraphic"]](https://www.wolframcloud.com/obj/resourcesystem/images/d99/d990eb12-b645-498f-bbcb-601a25e0d8c9/172c5e38a396e0e3.png)
![onnxFile = Export[FileNameJoin[{$TemporaryDirectory, "net.onnx"}], NetModel[
"MiDaS V2.1 Depth Perception Nets Trained on Multiple-Datasets"]]](https://www.wolframcloud.com/obj/resourcesystem/images/d99/d990eb12-b645-498f-bbcb-601a25e0d8c9/541138cb5dcd39f9.png)
