Resource retrieval
Get the pre-trained net:
NetModel parameters
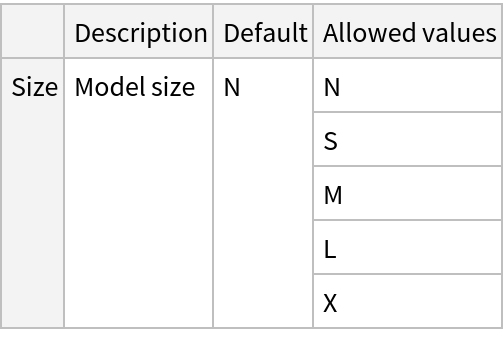
This model consists of a family of individual nets, each identified by a specific parameter combination. Inspect the available parameters:
Pick a non-default net by specifying the parameters:
Pick a non-default uninitialized net:
Evaluation function
Write an evaluation function to scale the result to the input image size and suppress the least probable detections:
Basic usage
Obtain the detected bounding boxes with their corresponding classes and confidences for a given image:
The model's output is an Association containing the detected "Boxes" and "Classes":
The "Boxes" key is a list of Rectangle expressions corresponding to the bounding boxes of the detected objects:
The "Classes" key contains the classes of the detected objects:
Visualize the detection:
Network result
The network computes eight thousand four hundred bounding boxes and the probability that the object is of any given class:
Visualize the bounding boxes scaled by their class probabilities:
Visualize all the boxes scaled by the probability that they contain a person:
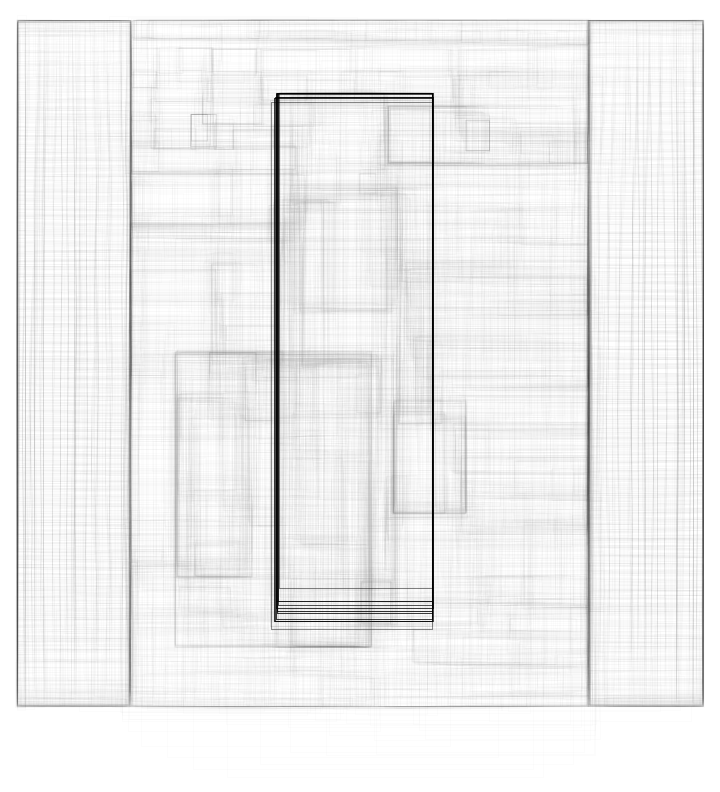
Superimpose the person predictions on top of the input received by the net:
Net information
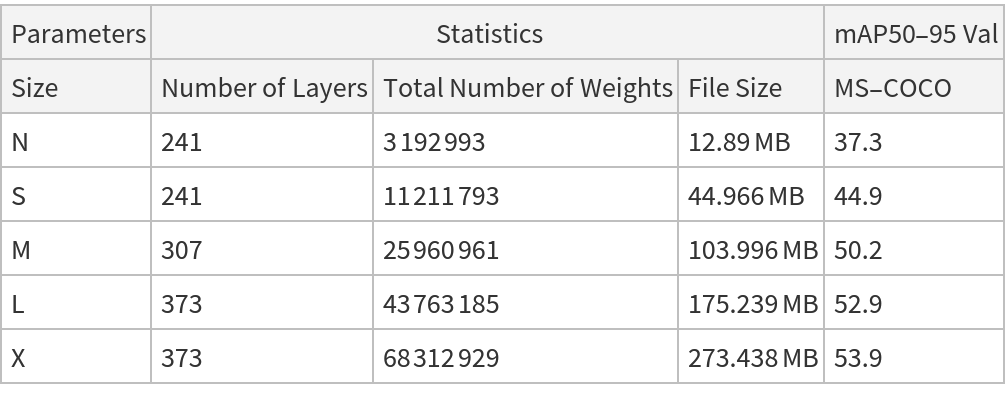
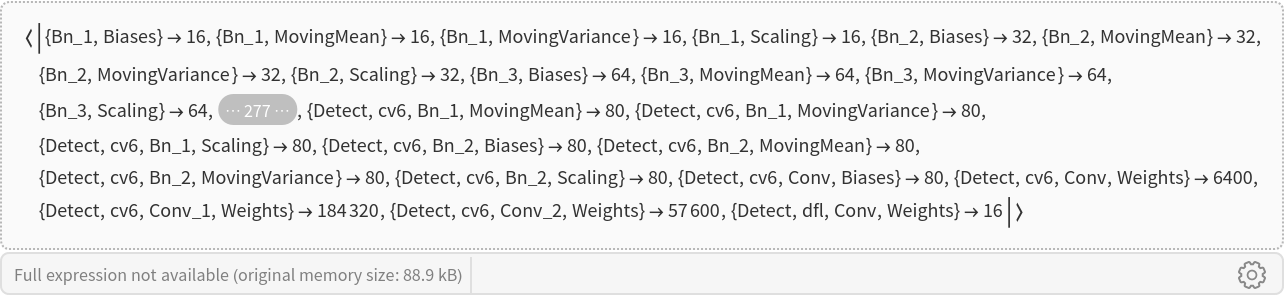
Inspect the number of parameters of all arrays in the net:
Obtain the total number of parameters:
Obtain the layer type counts:
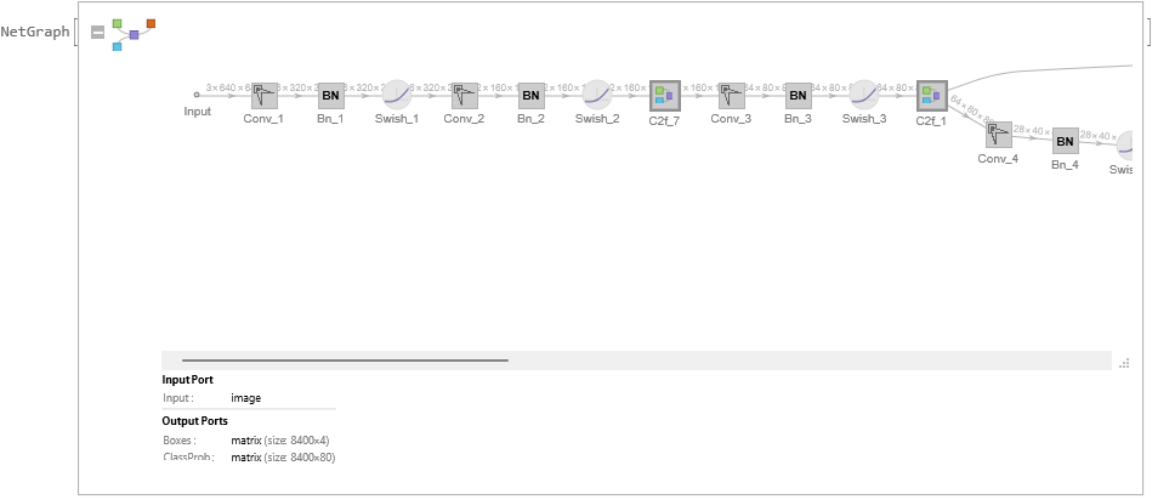
Display the summary graphic:
Export to ONNX
Export the net to the ONNX format:
Get the size of the ONNX file:
The size is similar to the byte count of the resource object:
Check some metadata of the ONNX model:
Import the model back into Wolfram Language. However, the NetEncoder and NetDecoder will be absent because they are not supported by ONNX:
![NetModel[{"YOLO V8 Detect Trained on MS-COCO Data", "Size" -> "L"}, "UninitializedEvaluationNet"]](https://www.wolframcloud.com/obj/resourcesystem/images/6c5/6c5797fd-4248-4cbc-921f-045f79f182f6/24c4d89a3ba70814.png)

![netevaluate[net_, img_, detectionThreshold_ : .25, overlapThreshold_ : .5] := Module[{res, imgSize, isDetection, probableClasses, probableBoxes, h, w, max, scale, padding, nms, result},
(*define image dimensions*)
imgSize = 640;
{w, h} = ImageDimensions[img];
(*get inference*)
res = net[img];
(*filter by probability*)
(*very small probability are thresholded*)
isDetection = UnitStep[Max /@ res["ClassProb"] - detectionThreshold];
{probableClasses, probableBoxes} = Map[Pick[#, isDetection, 1] &, {res["ClassProb"], res["Boxes"]}];
If[Length[probableBoxes] == 0, Return[{}]]; (*transform coordinates into rectangular boxes*)
max = Max[{w, h}];
scale = max/imgSize;
padding = imgSize*(1 - {w, h}/max)/2; probableBoxes = Apply[Rectangle[
scale*({#1 - #3/2, imgSize - #2 - #4/2} - padding),
scale*({#1 + #3/2, imgSize - #2 + #4/2} - padding)] &, probableBoxes, 2]; (*gather the boxes of the same class and perform non-
max suppression*)
nms = ResourceFunction["NonMaximumSuppression"][
probableBoxes -> Max /@ probableClasses, "Index", MaxOverlapFraction -> overlapThreshold];
<|
"Boxes" -> probableBoxes[[nms]],
"Classes" -> labels[[Last@*Ordering /@ Part[probableClasses, nms]]]
|>
];](https://www.wolframcloud.com/obj/resourcesystem/images/6c5/6c5797fd-4248-4cbc-921f-045f79f182f6/4644528d9627d47e.png)
![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/8acba9d3-bd1e-433e-8309-df969dd2897d"]](https://www.wolframcloud.com/obj/resourcesystem/images/6c5/6c5797fd-4248-4cbc-921f-045f79f182f6/18032e54e4e32ca5.png)

![imgSize = 640;
{w, h} = ImageDimensions[testImage];
max = Max[{w, h}];
scale = max/imgSize;
padding = imgSize*(1 - {w, h}/max)/2;
rectangles = Apply[Rectangle[
scale*({#1 - #3/2, imgSize - #2 - #4/2} - padding),
scale*({#1 + #3/2, imgSize - #2 + #4/2} - padding)
] &, res["Boxes"], 2];
Graphics[
MapThread[
{EdgeForm[Opacity[Total[#1] + .01]], #2} &,
{Max /@ res["ClassProb"], rectangles}
],
BaseStyle -> {FaceForm[], EdgeForm[{Thin, Black}]}
]](https://www.wolframcloud.com/obj/resourcesystem/images/6c5/6c5797fd-4248-4cbc-921f-045f79f182f6/5891756a66fa5305.png)
![Graphics[
MapThread[{EdgeForm[Opacity[#1 + .01]], #2} &, {Extract[
res["ClassProb"], {All, idx}], rectangles}],
BaseStyle -> {FaceForm[], EdgeForm[{Thin, Black}]}
]](https://www.wolframcloud.com/obj/resourcesystem/images/6c5/6c5797fd-4248-4cbc-921f-045f79f182f6/2fd13f5eccf4872b.png)
![HighlightImage[testImage, Graphics[
MapThread[{EdgeForm[{Thickness[#1/100], Opacity[(#1 + .01)/3]}], #2} &, {Extract[
res["ClassProb"], {All, idx}], rectangles}]], BaseStyle -> {FaceForm[], EdgeForm[{Thin, Red}]}]](https://www.wolframcloud.com/obj/resourcesystem/images/6c5/6c5797fd-4248-4cbc-921f-045f79f182f6/5706f7b5e1fd0c94.png)


![onnxFile = Export[FileNameJoin[{$TemporaryDirectory, "net.onnx"}], NetModel["YOLO V8 Detect Trained on MS-COCO Data"]]](https://www.wolframcloud.com/obj/resourcesystem/images/6c5/6c5797fd-4248-4cbc-921f-045f79f182f6/65451efb2a5143b8.png)
