YOLOX
Trained on
MS-COCO Data
YOLO (You Only Look Once) Version X is a family of object detection models published in August 2021. It is a revisitation of the YOLOv3-DarkNet53 model with several architectural and training improvements: the decoupling of classification and regression heads, the switch to an anchor-free pipeline, the introduction of an advanced label-assignment strategy named SimOTA (Simplified Optimal Transport Assignment) and the use of strong data augmentation techniques.
Examples
Resource retrieval
Get the pre-trained net:
NetModel parameters
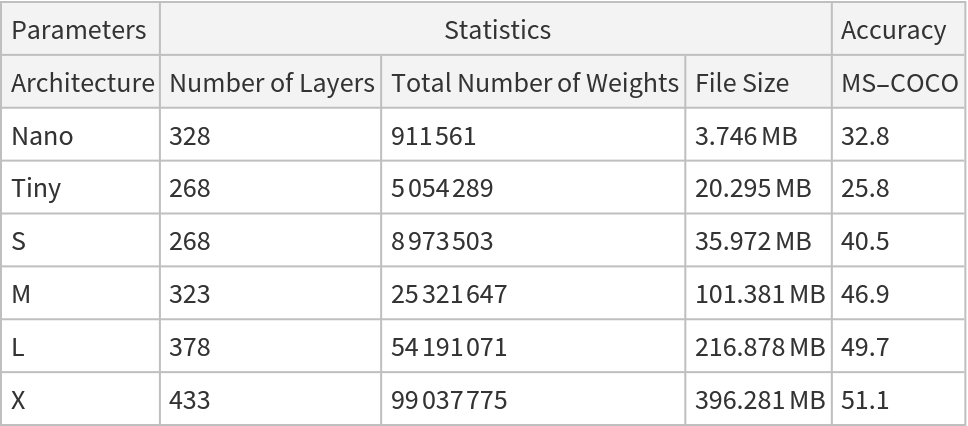
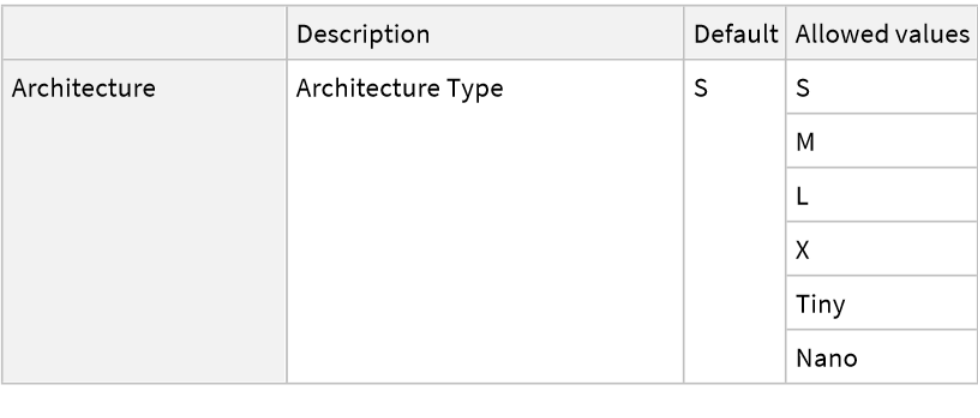
This model consists of a family of individual nets, each identified by a specific parameter combination. Inspect the available parameters:
Pick a non-default net by specifying the parameters:
Pick a non-default uninitialized net:
Evaluation function
Write an evaluation function to scale the result to the input image size and suppress the least probable detections:
Basic usage
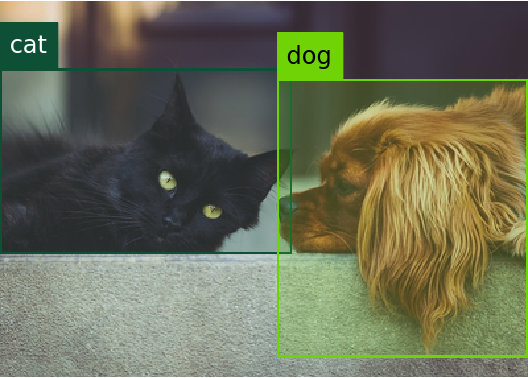
Obtain the detected bounding boxes with their corresponding classes and confidences for a given image:
Inspect which classes are detected:
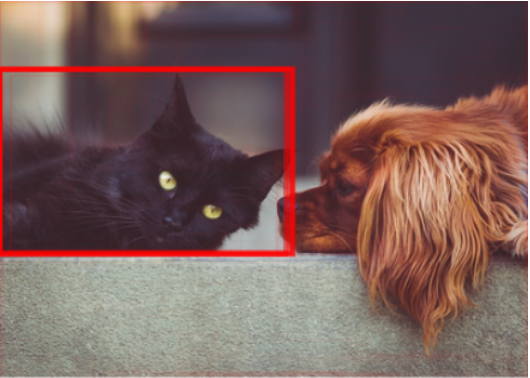
Visualize the detection:
Network result
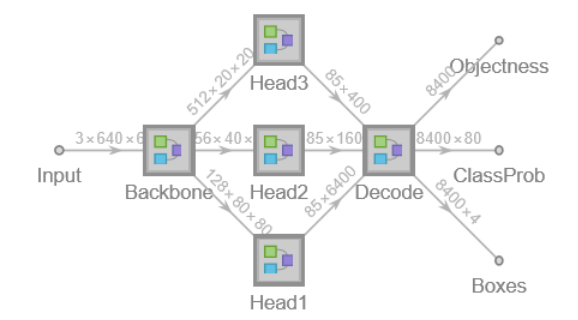
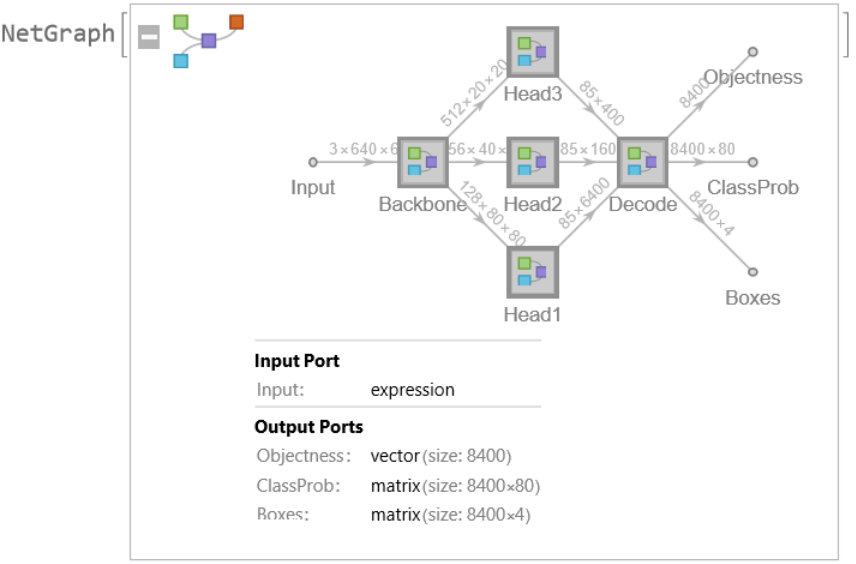
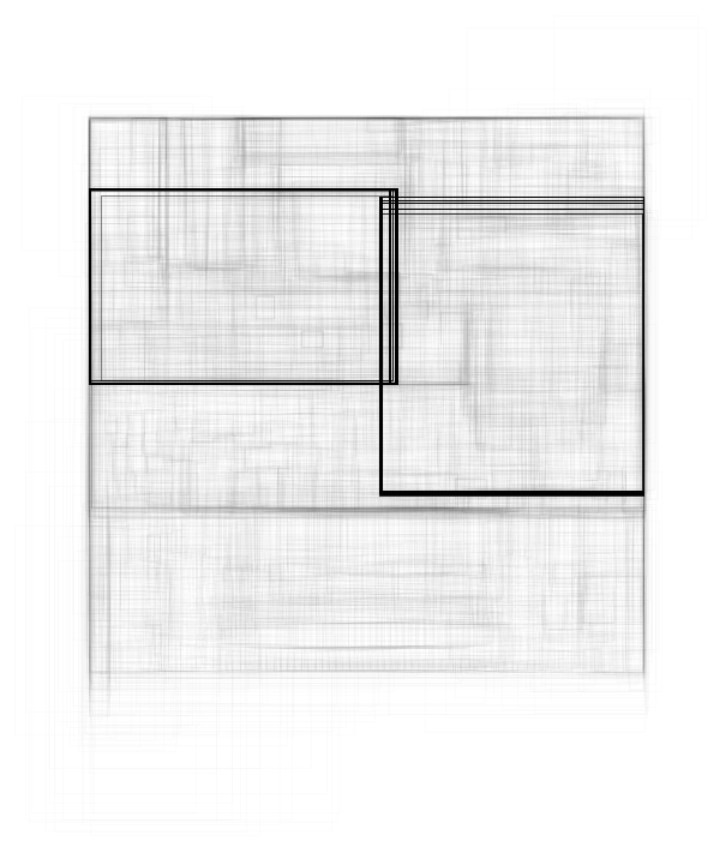
The network computes 8,400 bounding boxes and the probability that the objects in each box are of any given class:
Rescale the bounding boxes to the coordinates of the input image and visualize them scaled by their "objectness" measures:
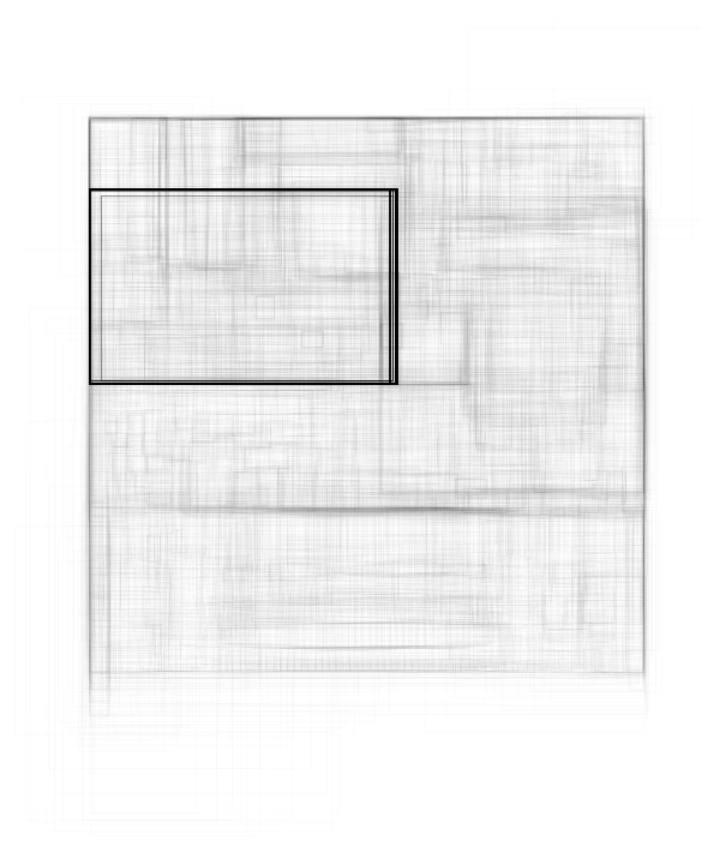
Visualize all the boxes scaled by the probability that they contain a cat:
Superimpose the cat prediction on top of the scaled input received by the net:
Net information
Inspect the number of parameters of all arrays in the net:
Obtain the total number of parameters:
Obtain the layer type counts:
Display the summary graphic:
Resource History
Reference
-
Z. Ge, S. Liu, F. Wang, Z. Li, J. Sun,"YOLOX: Exceeding YOLO Series in 2021," arXiv:2107.08430 (2021)
- Available from:
-
Rights:
Apache License
![NetModel[{"YOLOX Trained on MS-COCO Data", "Architecture" -> "L"}, "UninitializedEvaluationNet"]](https://www.wolframcloud.com/obj/resourcesystem/images/69e/69ec7641-a8bc-4c3b-a4a2-2f4195d2ef3b/719105f4f651b222.png)
![netevaluate[model_, img_, detectionThreshold_ : .5, overlapThreshold_ : .5] := Module[{imgSize, classes, coords, obj, scores, bestClass, probable, probableClasses, probableScores, probableBoxes, h, w, max, scale, padding, nms, finals},
imgSize = Last@NetExtract[model, {"Input", "Output"}];
{obj, classes, coords} = Values@model[img];
(*each class probability is rescaled with the box objectness*)
scores = classes*obj;
bestClass = Last@*Ordering /@ scores;
(*filter by probability*)
(*very small probability are thresholded*)
probable = UnitStep[obj - detectionThreshold]; {probableClasses, probableBoxes, probableScores} = Map[Pick[#, probable, 1] &, {labels[[bestClass]], coords, obj}];
If[Length[probableBoxes] == 0, Return[{}]];
(*transform coordinates into rectangular boxes*)
{w, h} = ImageDimensions[img];
max = Max[{w, h}];
scale = max/imgSize ;
padding = imgSize*(1 - {w, h}/max);
padding[[1]] = padding[[1]]/2;
probableBoxes = Apply[
Rectangle[
scale*({#1 - #3/2, imgSize - #2 - #4/2} - padding),
scale*({#1 + #3/2, imgSize - #2 + #4/2} - padding)
] &, probableBoxes, 1];
(*gather the boxes of the same class and perform non-
max suppression*)
nms = nonMaximumSuppression[probableBoxes -> probableScores, "Index"];
finals = Transpose[{probableBoxes, probableClasses, probableScores}];
Part[finals, nms]
];](https://www.wolframcloud.com/obj/resourcesystem/images/69e/69ec7641-a8bc-4c3b-a4a2-2f4195d2ef3b/4929e7048b7caecc.png)
![(* Evaluate this cell to get the example input *) CloudGet["https://www.wolframcloud.com/obj/96f1ffd2-3499-4db5-beaa-3345691fceaf"]](https://www.wolframcloud.com/obj/resourcesystem/images/69e/69ec7641-a8bc-4c3b-a4a2-2f4195d2ef3b/32356a11a5e32496.png)
![rectangles = Block[
{w, h, max, imgSize, scale, padding},
{w, h} = ImageDimensions[testImage];
max = Max[{w, h}];
imgSize = 640;
scale = max/imgSize ;
padding = imgSize*(1 - {w, h}/max);
Apply[
Rectangle[
scale*({#1 - #3/2, imgSize - #2 - #4/2} - padding),
scale*({#1 + #3/2, imgSize - #2 + #4/2} - padding)
] &,
res["Boxes"],
1
]
];](https://www.wolframcloud.com/obj/resourcesystem/images/69e/69ec7641-a8bc-4c3b-a4a2-2f4195d2ef3b/601cec0924485888.png)
![Graphics[
MapThread[{EdgeForm[Opacity[#1 + .01]], #2} &, {res["Objectness"]*
Extract[res["ClassProb"], {All, idx}], rectangles}],
BaseStyle -> {FaceForm[], EdgeForm[{Thin, Black}]}
]](https://www.wolframcloud.com/obj/resourcesystem/images/69e/69ec7641-a8bc-4c3b-a4a2-2f4195d2ef3b/1b09c2017b3c3924.png)
![HighlightImage[testImage, Graphics[
MapThread[{EdgeForm[{Thickness[#1/100], Opacity[(#1 + .01)/3]}], #2} &, {res["Objectness"]*
Extract[res["ClassProb"], {All, idx}], rectangles}]], BaseStyle -> {FaceForm[], EdgeForm[{Thin, Red}]}]](https://www.wolframcloud.com/obj/resourcesystem/images/69e/69ec7641-a8bc-4c3b-a4a2-2f4195d2ef3b/0d00fe5fa3ffcaac.png)