Wolfram.com
WolframAlpha.com
WolframCloud.com
Wolfram Language
Example Repository
Ready-to-use examples of Wolfram Language
Primary Navigation
Categories
Algebra
Astronomy
Audio Processing
Calculus
Cellular Automata
Chemistry
Complex Systems
Computer Science
Computer Vision
Control Systems
Creative Arts
Data Science
Engineering
Finance & Economics
Finite Element Method
Food & Nutrition
Geography
Geometry
Graphs & Networks
Image Processing
Life Sciences
Machine Learning
Mathematics
Optimization
Physics
Probability & Statistics
Puzzles and Recreation
Quantum Computation
Signal Processing
Social Sciences
System Modeling
Tabular Processing
Text & Language Processing
Time-Related Computation
Video Processing
Visualization & Graphics
Alphabetical List
Submit a New Example
Learn More about
Wolfram Language
Related Pages
Related Symbols
ParametricPlot
Animate
Related Categories
Mathematics
Visualization & Graphics
Visualize Homotopies in Euclidean space
Example Notebook
Open in Cloud
Download Notebook
Homotopy is a fundamental concept in algebraic topology that represents the continuous deformation of one space into another. More precisely, two maps
f
,
g
:
X
-
>
Y
are said to be homotopic if there exists a continuous map
F
:
X
×
[
0
,
1
]
-
>
Y
such that
F
(
x
,
0
)
=
f
(
x
)
and
F
(
x
,
1
)
=
g
(
x
)
for all
x
∈
X
. In
n
, any two continuous maps defined on a domain are homotopic via the straight-line homotopy given by
F
(
x
,
t
)
=
(
1
-
t
)
f
(
x
)
+
t
g
(
x
)
. In this example we visualize a few such cases.
A circle being homotopic to the constant map, we can see it shrinking down to the point
(
0
,
0
)
in
2
:
I
n
[
1
]
:
=
A
n
i
m
a
t
e
[
P
a
r
a
m
e
t
r
i
c
P
l
o
t
[
(
1
-
t
)
{
C
o
s
[
2
π
x
]
,
S
i
n
[
2
π
x
]
}
+
t
0
,
{
x
,
0
,
1
}
,
P
l
o
t
R
a
n
g
e
1
.
1
{
{
-
1
,
1
}
,
{
-
1
,
1
}
}
]
,
{
t
,
0
,
1
}
,
C
o
n
t
r
o
l
P
l
a
c
e
m
e
n
t
T
o
p
]
O
u
t
[
1
]
=
t
-
1
.
0
-
0
.
5
0
.
5
1
.
0
-
1
.
0
-
0
.
5
0
.
5
1
.
0
The same circle being homotopic to an ellipse:
I
n
[
2
]
:
=
A
n
i
m
a
t
e
[
P
a
r
a
m
e
t
r
i
c
P
l
o
t
[
(
1
-
t
)
{
C
o
s
[
2
π
x
]
,
S
i
n
[
2
π
x
]
}
+
t
{
2
C
o
s
[
2
π
x
]
,
S
i
n
[
2
π
x
]
}
,
{
x
,
0
,
1
}
,
P
l
o
t
R
a
n
g
e
1
.
1
{
{
-
2
,
2
}
,
{
-
1
,
1
}
}
]
,
{
t
,
0
,
1
}
,
C
o
n
t
r
o
l
P
l
a
c
e
m
e
n
t
T
o
p
]
O
u
t
[
2
]
=
t
-
2
-
1
1
2
-
1
.
0
-
0
.
5
0
.
5
1
.
0
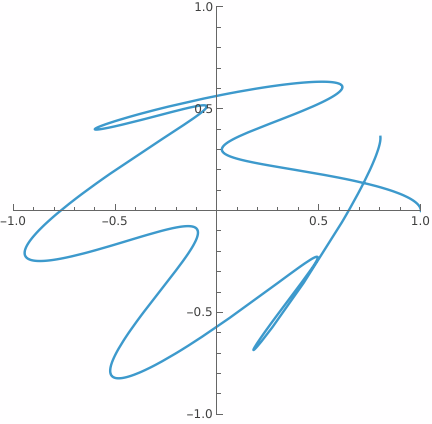
A more complex example:
I
n
[
3
]
:
=
A
n
i
m
a
t
e
[
P
a
r
a
m
e
t
r
i
c
P
l
o
t
[
(
1
-
t
)
{
C
o
s
[
1
0
π
x
]
C
o
s
[
x
]
,
C
o
s
[
1
0
π
x
]
S
i
n
[
x
]
}
+
t
{
C
o
s
[
2
π
x
]
,
S
i
n
[
2
π
x
]
}
,
{
x
,
0
,
1
}
,
P
l
o
t
R
a
n
g
e
{
{
-
1
,
1
}
,
{
-
1
,
1
}
}
]
,
{
t
,
0
,
1
}
,
C
o
n
t
r
o
l
P
l
a
c
e
m
e
n
t
T
o
p
]
O
u
t
[
3
]
=
t
-
1
.
0
-
0
.
5
0
.
5
1
.
0
-
1
.
0
-
0
.
5
0
.
5
1
.
0
In 3 dimensions, a helix is homotopic to the a circle:
I
n
[
4
]
:
=
A
n
i
m
a
t
e
[
P
a
r
a
m
e
t
r
i
c
P
l
o
t
3
D
[
(
1
-
t
)
{
C
o
s
[
1
1
×
2
π
x
]
,
S
i
n
[
1
1
×
2
π
x
]
,
2
x
}
+
t
{
C
o
s
[
2
π
x
]
,
S
i
n
[
2
π
x
]
,
0
}
,
{
x
,
0
,
1
}
]
,
{
t
,
0
,
1
}
,
C
o
n
t
r
o
l
P
l
a
c
e
m
e
n
t
T
o
p
]
O
u
t
[
4
]
=
t
External Links
Homotopy -- from Wolfram MathWorld
See Also
Brouwer's Fixed Point Theorem on a Square
BettiNumbers
General Topology EntityStore
Related Symbols
ParametricPlot
Animate
Publisher Information
Contributed by:
Naman T.