Ready-to-use examples of Wolfram Language
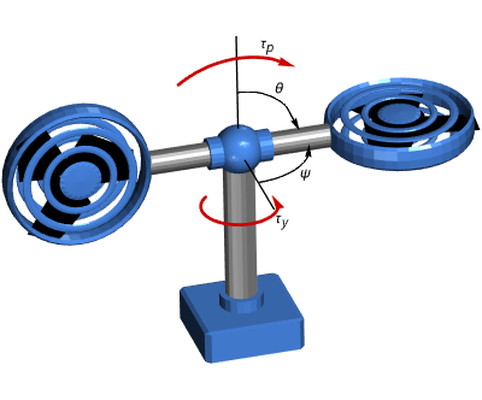
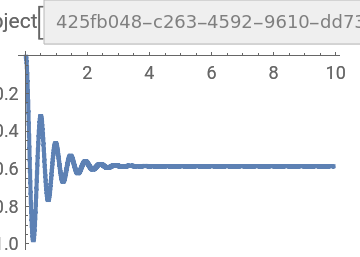
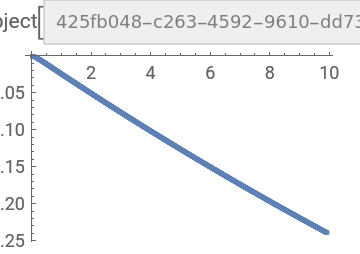
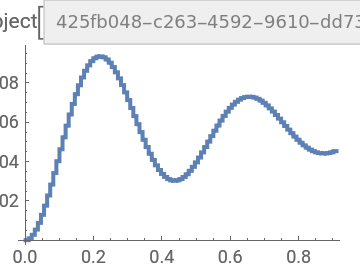
Model the pitch and yaw dynamics of a helicopter and stabilize them with respect to disturbances